© 2019 Microchip Technology Inc. page 1
AN1299 Demonstration ReadMe for the
dsPICDEM™ MCHV-2 Development Board or
dsPICDEM™ MCHV-3 Development Board with the
dsPIC33CK256MP508 Internal Op-Amp Motor Control PIM
(MPLAB
®
X IDE)
1. INTRODUCTION
This document describes the setup requirements for running the Single-Shunt Reconstruction Al-
gorithm, which is referenced in AN1299 “Single-Shunt Three-Phase Current Reconstruction Algo-
rithm for Sensorless FOC of a PMSM”.
The demonstration is configured to run on either the dsPICDEM™ MCHV-2 Development Board or
the dsPICDEM™ MCHV-3 Development Board in the Internal Op-Amp configuration with the
dsPIC33CK256MP508 Internal Op-Amp Motor Control Plug-In Module(PIM).
2. SUGGESTED DEMONSTRATION REQUIREMENTS
2.1. Motor Control Application Firmware Required for the Demonstration
• AN1299_dsPIC33CK256MP508_EXT_INT_OPAMP_MCLV2_MCHV2_MCHV3.zip
2.2. Software Tools Used for Testing the firmware
• MPLAB
®
X IDE v5.10
• MPLAB
®
XC16 Compiler v1.36b
• MPLAB
®
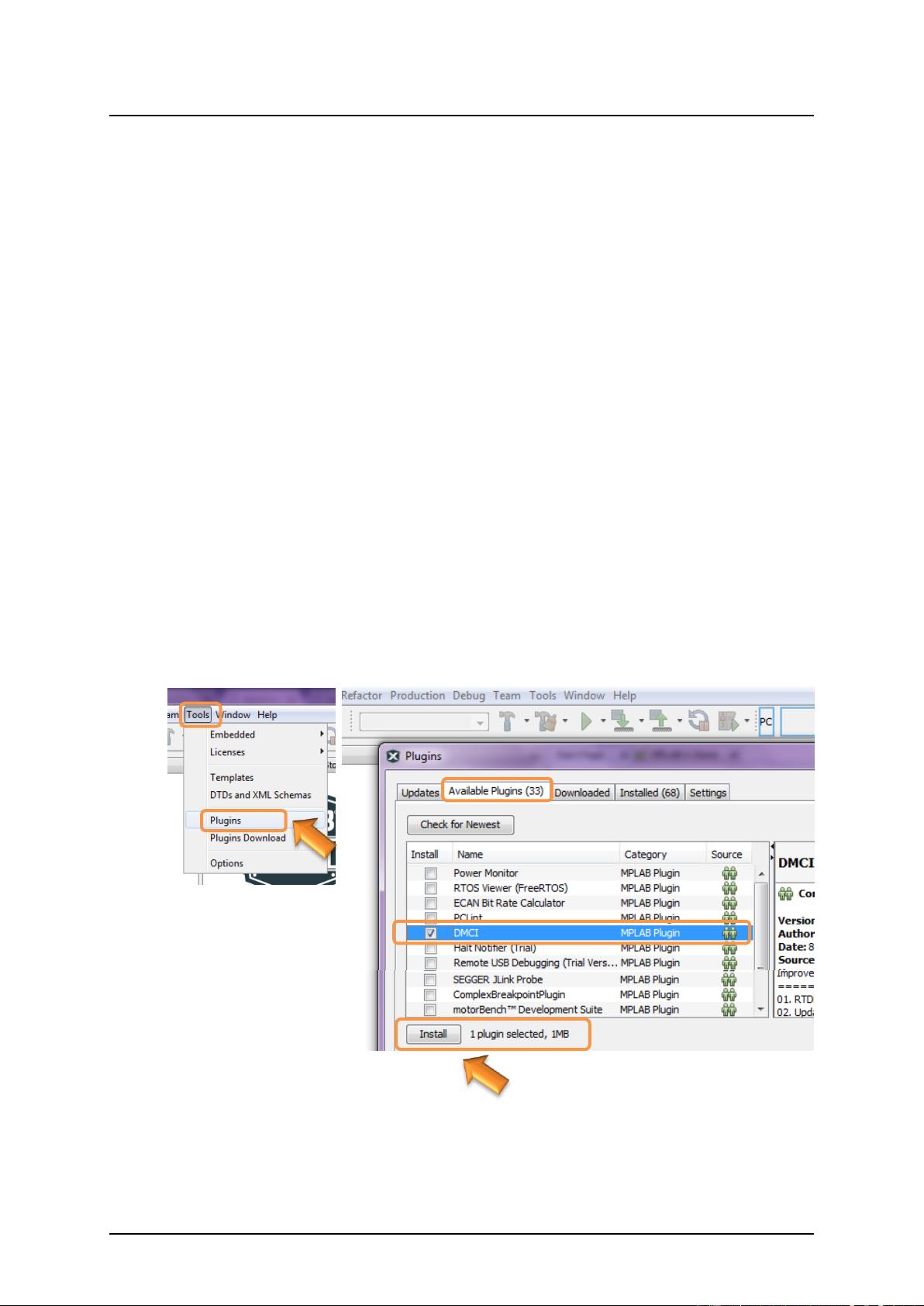
X IDE Plugin: Data Monitor and Control Interface (DMCI) v2.71
• MPLAB
®
X IDE Plugin: Latest version of X2CScope Plug-in
2.3. Hardware Tools Required for the Demonstration
To set up the demonstration, you may use one of the High-Voltage Motor Control Development
Boards mentioned below:
• dsPICDEM™ MCHV-2 Development Board (DM330023-2) or
• dsPICDEM™ MCHV-3 Development Board (DM330023-3)
• High Voltage 3-Phase Permanent Magnet Synchronous Motor (AC300025)
• dsPIC33CK256MP508 Internal Op-Amp Motor Control Plug-in module (MA330041-2)
Note:
The software used for testing the firmware prior to release is listed above. It is
recommended to use the version listed above or later versions for building the
firmware.
Note:
In this document, hereinafter High-Voltage Motor Control Development Board selected
for setting up the demonstration is referred as Development Board.
Note:
All items listed under the section 2.3. Hardware Tools Required for the Demonstration
are available at microchip DIRECT.
Note:
In this document, hereinafter this firmware package is referred as firmware.