
实用标准
PID 控制器设计
一、PID 控制的基本原理和常用形式及数学模型
具有比例-积分-微分控制规律的控制器,称 PID 控制器。这种组合具有三种基本规律各
自的特点,其运动方程为:
m(t)
K
p
e(t)
K
p
K
i
e(t)dt
K
p
K
d
0
t
de(t)
(1-1)
dt
相应的传递函数为:
K
i
G
c
(s)
K
p
1
S
K
d
S
K
p
•
2
S
K
i
K
d
S 1
S
(1-2)
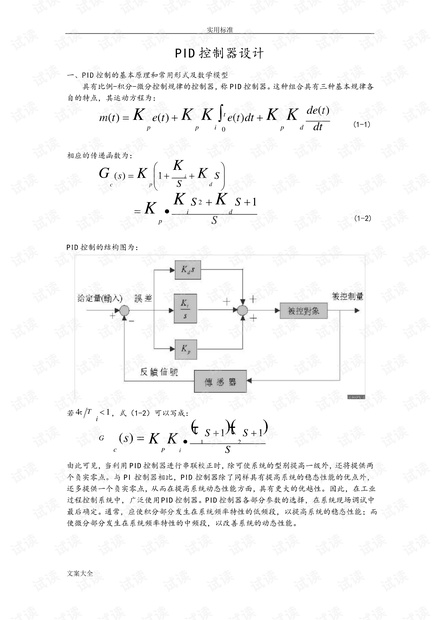
PID 控制的结构图为:
若
4
T
i
1
,式(1-2)可以写成:
G
(s)
K
c
P
K
i
•
1
S 1
2
S 1
S
由此可见,当利用 PID 控制器进行串联校正时,除可使系统的型别提高一级外,还将提供两
个负实零点。与 PI 控制器相比,PID 控制器除了同样具有提高系统的稳态性能的优点外,
还多提供一个负实零点,从而在提高系统动态性能方面,具有更大的优越性。因此,在工业
过程控制系统中,广泛使用 PID 控制器。PID 控制器各部分参数的选择,在系统现场调试中
最后确定。通常,应使积分部分发生在系统频率特性的低频段,以提高系统的稳态性能;而
使微分部分发生在系统频率特性的中频段,以改善系统的动态性能。
文案大全

剩余16页未读,继续阅读






评论0
最新资源