在详细解析文件内容之前,我们首先要了解Adams软件和其在机械仿真中的应用。Adams软件是美国MSC公司开发的一款机械系统动力学仿真分析软件。它广泛应用于汽车、航空航天、重工业和生物力学等领域,用于仿真复杂机械系统中各个部件的运动学和动力学性能。Adams软件能够帮助工程师在产品实际制造之前,发现和解决设计中存在的潜在问题。
Adams中的AdamsMachinery模块是专门用于机械系统的建模和仿真,它包含的cable绳索模块是用于构建和分析绳索、链条等柔性体结构的仿真模型。在本教程中,我们将利用这一模块建立双绳索轨道,并使四轮机器人能够在这个轨道上进行行走仿真分析。
根据教程,建立双绳索轨道的步骤可以划分为以下几个重要知识点:
1. 标记点(Marker)的建立和管理
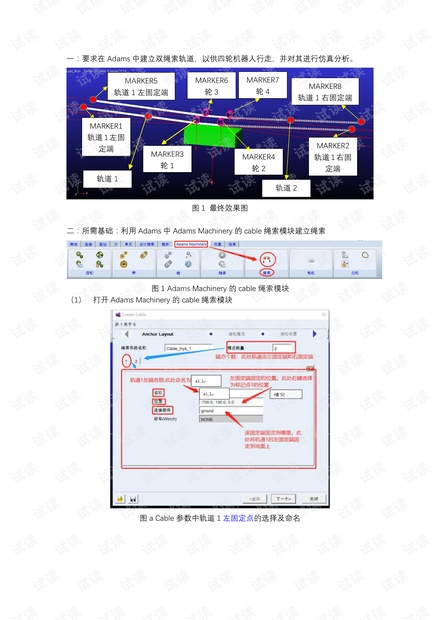
在Adams中,标记点(Marker)是定义物体在空间中的位置、方向和作用点的基础元素。在教程中,我们首先需要创建四个标记点,用来定义绳索轨道1的左固定端、右固定端、轮1和轮2的位置。接着,复制这四个标记点,形成另外四个,用来定义轨道2。随后,通过移动和旋转这些标记点,来调整它们的空间位置和方向,以便后续建立绳索轨道。
2. 建立绳索轨道
使用AdamsMachinery中的cable模块,我们可以通过指定标记点来建立绳索轨道。这一过程包括设置绳索的属性,比如固定端、轮的直径、位置、绳缠绕方向及顺序等。这些参数对于确保轨道在仿真中的真实性和准确性至关重要。
3. 建立机器人的四轮结构
在建立完绳索轨道之后,我们需要创建四轮机器人的四个轮子,这些轮子将与绳索轨道相配合,使机器人能够在轨道上运动。每个轮子的位置和直径等参数都需要根据实际情况进行设定。
4. 机器人机身的建立和与轮子的连接
为了实现四轮机器人在绳索轨道上的行走,我们还需要建立机器人的机身。在这个案例中,机身被简化为一个长方体。建立机身之后,我们需要将之前建立的四个轮子与机身连接起来。具体的操作是将每个轮子的旋转对象设置为长方体,这样才能让轮子的旋转运动传递到机身,从而实现整个机器人的运动。
5. 添加驱动和力,进行仿真
为了使机器人在轨道上运动,我们需要添加驱动(比如马达)和可能的外力。通过设置相应的驱动参数和力的作用方式,我们可以模拟实际操作中机器人的行走情况。完成上述设置后,我们就可以启动Adams的仿真分析,观察机器人的运动状况,分析其性能。
本教程的最终目的是通过对四轮机器人在双绳索轨道上的建模和仿真,掌握Adams软件中的相关操作技能,尤其是绳索轨道的建立和柔性体仿真分析的技巧。这对于从事复杂机械系统设计和分析的工程师来说是一个非常实用的学习案例。通过模拟实际的机械运动环境,工程师能够更加准确地预测产品在实际使用中的表现,从而提高产品的设计质量与性能。