### 永磁同步电机(PMSM)矢量控制中双闭环PI参数计算
#### 一、引言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因其高效、体积小、重量轻等特点,在现代工业自动化领域得到了广泛应用。为了实现对PMSM的有效控制,采用矢量控制技术是非常必要的。矢量控制技术能够将电机的交流控制问题转化为类似直流电机的控制问题,从而提高控制性能。本篇文章将详细介绍永磁同步电机矢量控制中双闭环PI调节器参数的计算方法。
#### 二、电流环PI参数计算
##### 2.1 电流环传递函数
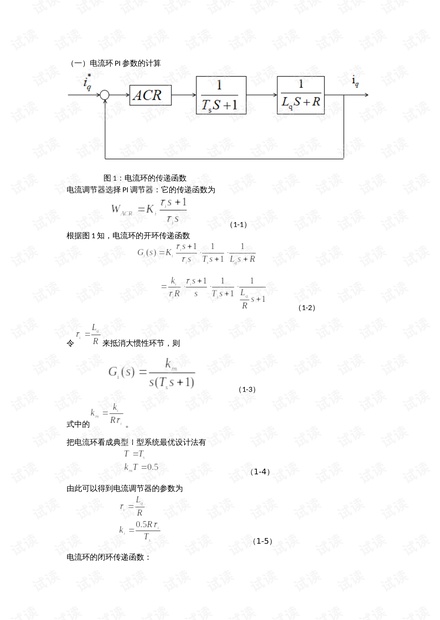
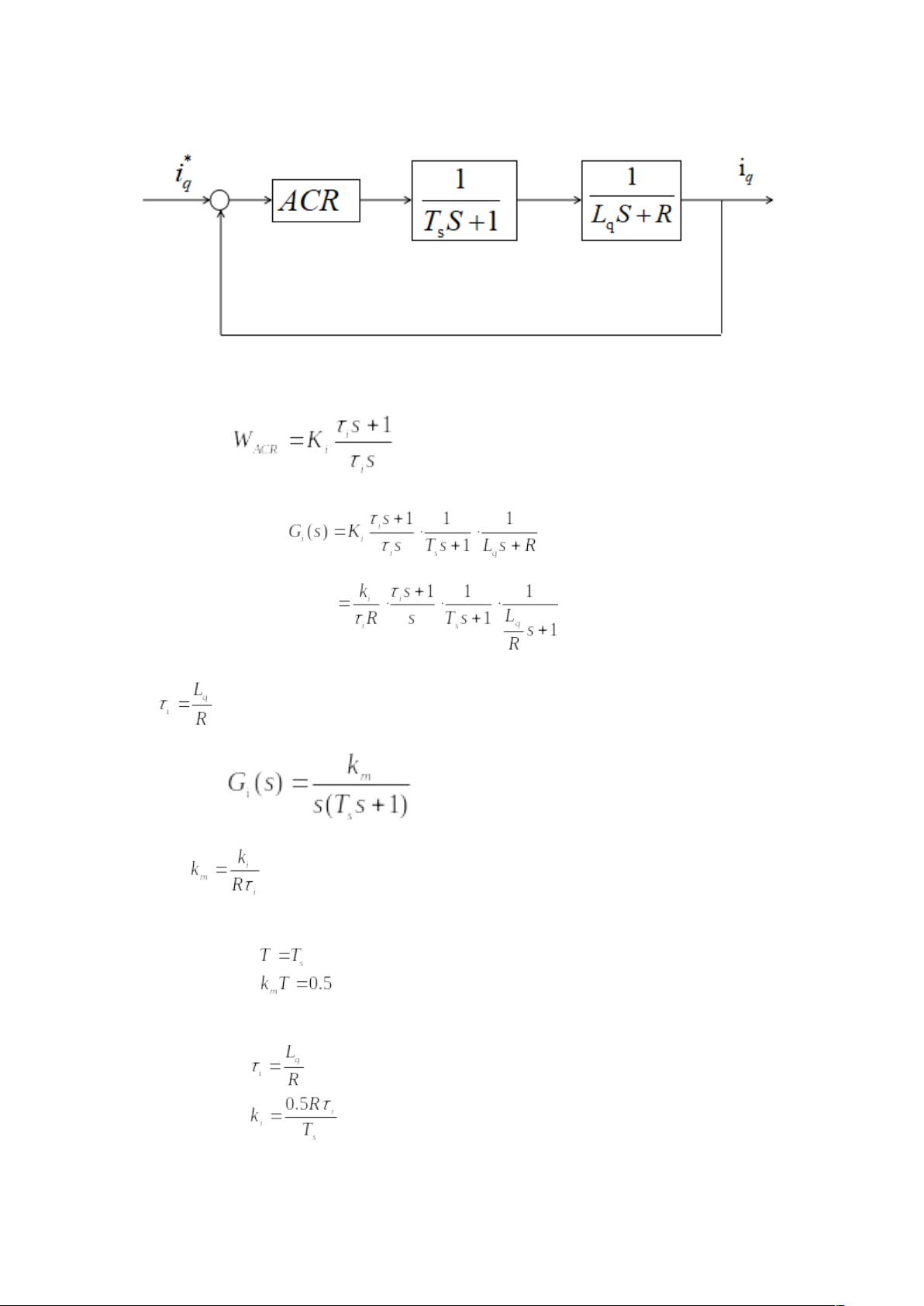
考虑电流环的传递函数,如图1所示。电流调节器选用PI调节器,其传递函数表示为:
\[ G_{c_i}(s) = K_{p_i} + \frac{K_{i_i}}{s} \] (1-1)
其中,\(K_{p_i}\) 和 \(K_{i_i}\) 分别是比例系数和积分系数。
电流环的开环传递函数可表示为:
\[ G_{ol_i}(s) = G_{c_i}(s)G_{m_i}(s)H_i(s) \] (1-2)
其中,\(G_{m_i}(s)\) 表示电机模型,\(H_i(s)\) 表示反馈环节。
为了简化控制系统,通常会消除系统中的大惯性环节。为此,我们引入一个补偿环节 \(C(s)\),使得:
\[ C(s)G_{m_i}(s) = \frac{k}{s + z} \] (1-3)
其中,\(k\) 和 \(z\) 是常数,\(z\) 的值选择接近电机时间常数的倒数,以抵消大惯性环节的影响。
##### 2.2 参数设计
根据电流环传递函数的特性,我们可以将其视为典型I型系统,并按照最优设计法计算PI调节器的参数。具体来说,可以通过以下公式计算出电流调节器的参数:
\[ T_i = \frac{\omega_n}{\zeta} \] (1-4)
\[ K_{p_i} = \frac{k}{T_i} \] (1-5a)
\[ K_{i_i} = k \cdot \omega_n \] (1-5b)
其中,\(T_i\) 为电流调节时间常数,\(\omega_n\) 为自然频率,\(\zeta\) 为阻尼比。电流环的闭环传递函数为:
\[ G_{cl_i}(s) = \frac{G_{ol_i}(s)}{1 + G_{ol_i}(s)} \] (1-6)
#### 三、转速环PI参数计算
##### 3.1 转速环传递函数
接下来考虑转速环的传递函数,如图2所示。转速调节器同样选用PI调节器,其传递函数表示为:
\[ G_{c_\omega}(s) = K_{p_\omega} + \frac{K_{i_\omega}}{s} \] (1-7)
转速环的开环传递函数表示为:
\[ G_{ol_\omega}(s) = G_{c_\omega}(s)G_{i}(s)G_{m_\omega}(s)H_\omega(s) \] (1-7)
其中,\(G_{m_\omega}(s)\) 表示电机模型,\(G_{i}(s)\) 表示电流环闭环传递函数,\(H_\omega(s)\) 表示反馈环节。
##### 3.2 参数设计
考虑到转速环的特点,我们可以将其视为典型II型系统进行设计。通过以下公式计算PI调节器的参数:
\[ \omega_{n\omega}^2 = \frac{K_{p_\omega}}{K_{i_\omega}} \] (1-8)
\[ \omega_{n\omega} = \sqrt{\frac{K_{p_\omega}}{K_{i_\omega}}} \] (1-9)
其中,\(\omega_{n\omega}\) 为转速环的自然频率。因此,我们可以通过下面的公式计算出转速PI调节器的参数:
\[ K_{p_\omega} = \frac{k_{\omega}}{T_{\omega}} \] (1-10a)
\[ K_{i_\omega} = k_{\omega} \cdot \omega_{n\omega} \] (1-10b)
其中,\(k_{\omega}\) 和 \(T_{\omega}\) 分别为转速环的比例系数和时间常数。
##### 3.3 参数限幅
为了防止PI调节器参数过大导致系统不稳定或过载,需要对PI调节器参数进行限幅处理。通常情况下,转速环PI参数限幅设置在最大值的1.5-2倍之间:
\[ K_{p_\omega}^{\text{max}} = 1.5 \times K_{p_\omega} \] (1-11a)
\[ K_{i_\omega}^{\text{max}} = 1.5 \times K_{i_\omega} \] (1-11b)
对于电流环PI参数的限幅,也遵循类似的逻辑:
\[ K_{p_i}^{\text{max}} = 1.5 \times K_{p_i} \] (1-12a)
\[ K_{i_i}^{\text{max}} = 1.5 \times K_{i_i} \] (1-12b)
#### 四、总结
通过对永磁同步电机矢量控制中双闭环PI调节器参数的计算过程进行分析,我们不仅可以获得精确的控制效果,还能有效地提高系统的稳定性和响应速度。通过合理的设计和参数调整,可以在各种工况下确保电机运行的平滑性和可靠性。这种方法对于现代工业自动化领域的电机驱动控制具有重要的实际意义。