
Received: 4 May 2022 Revised: 27 July 2022 Accepted: 17 August 2022
DOI: 10.1002/acs.3496
RESEARCH ARTICLE
Quantized output feedback resilient control of uncertain
systems under hybrid cyber attacks
Kun Yu Xiao-Heng Chang
School of Control Science and
Engineering, Bohai University, Jinzhou,
China
Correspondence
Xiao-Heng Chang, School of Control
Science and Engineering, Bohai
University, Jinzhou, China.
Email: changxiaoheng@sina.com
Summary
This article investigates the output feedback resilient control problem of an
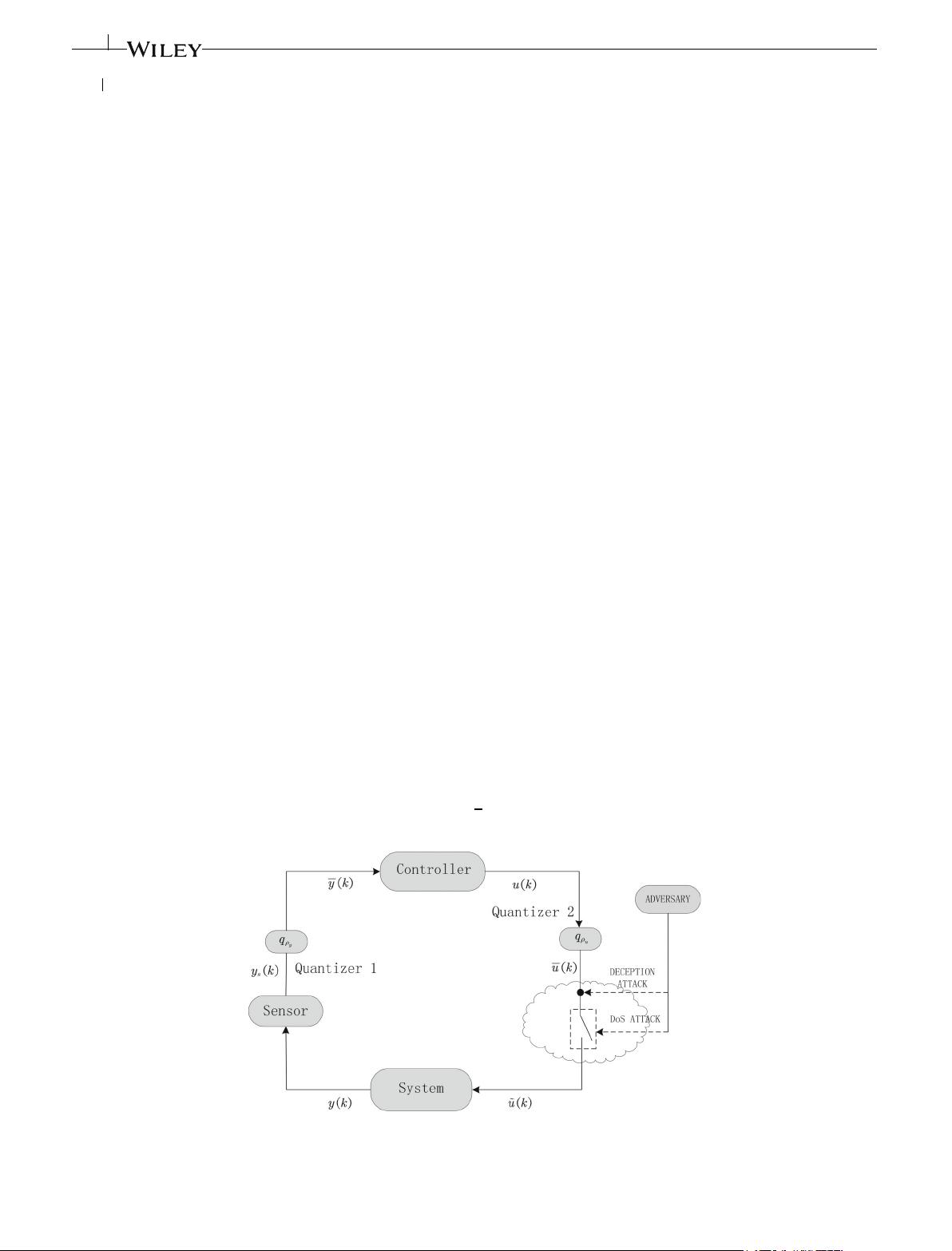
uncertain system with two quantized signals under hybrid cyber attacks. First,
foruncertainsystems,theoutputsignal ofthesystemand theoutputsignalofthe
controllerarequantizedonce by the quantizers beforethey arepassedtothecon-
troller and the system respectively, thus affecting the signal with quantization
errorterms.Atthe same time, The adverse effects of hybridcyber attacks,includ-
ing denial-of-service attacks and deception attacks, are also taken into account
during the signaling process. In this article, a guaranteedcost resilientcontroller
design method is proposed for the above situation so that the closed-loop system
can be guaranteed to be stable or to meet the given performance index. In addi-
tion, by solving the given set of linear matrix inequalities, the design conditions
for the relevant parameters required for the resilient controller can be obtained.
Finally, the validity of the design method can be verified by simulation.
KEYWORDS
guaranteed cost control, hybrid cyber attacks, signal processing, two quantized signals, uncertain
systems
1 INTRODUCTION
Differentform the traditionaldesignated controlsystem, the networkcontrol system iscompletely distributed, connected
bythecommunication network by sensors,controllers,andactuators. Comparedwiththeformer,thenetworkcontrolsys-
tem has obvious advantages such as high applicability, high stability and low installation cost. Due to that, it has attracted
the eager attention of a large number of researchers in recent years. With more and more in-depth research, we found
that a series of problems that affect the performance of NCSs, such as signal quantized, packet dropouts, and information
transmission delay, will appear in the communication network. These problems have been discussed.
1-3
Other effects on
thesystemcanalso be observed moreintuitivelybythe filter.
4-6
Duetothefactthat in reality thereareaseriesof influences
such as temperature, humidity, and so forth, the sensors do not always work properly. Therefore, errors in signal trans-
mission due to sensor failure should be taken into account in the study. Through the research of scientific researchers, we
have learned that because of the uncertainty of the channel transmission rate state, the signal will inevitably be affected
by the quantized effect during transmission. The result is that the system state is affected to some extent, resulting in limit
cycles and chaotic behavior that degrade performance and stability. This is a problem that we urgently need to study and
solve.Therearealreadymanyliteraturesto analyze it.
7-11
Amongthe existing researcheson quantized feedbackproblems,
dynamic quantized strategies are one of the more popular ones. Compared with other quantized strategies, we assume
that the dynamic quantizer used in the dynamic quantized strategy has a time-varying effect, and dynamic parameters
2954 ©2022JohnWiley&SonsLtd. wileyonlinelibrary.com/journal/acs Int J Adapt Control Signal Process. 2022;36:2954–2970.

剩余16页未读,继续阅读
资源评论


pk_xz123456
- 粉丝: 2968
- 资源: 4150









最新资源
- S7-200基于PLC的复杂路交通灯控制系统 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
- 基于PLC的4路抢答器控制系统的设计四路抢答 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
- 双容水箱液位PID控制设计(matlab simulink控制采用p pi pd pid 四种对比 包含说明文档
- S7-200组态王基于PLC的游泳池水处理 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
- 远景能源风机平台主控制系统
- 光伏同步发电机并网matlab simulink模型,pv-vsg 通过波形观察,运行良好 只提供模型,供参考学习
- 六轴机械臂时间能量冲击最优轨迹规划 轨迹优化 支持最高7次NURBS 默认7次 可修改成其他阶数 扩展性强 可出 关节位置 关节速度 关节加速度图 pareto最优解集图 可复现浙大机械手多目标轨迹规
- MATLAB simulink软件设计汽车七自由度整车模型的建模 有仿真结果文件和资料 下图是部分仿真
- 埃斯顿伺服驱动器源码;PCB;源理图;BOM;技术参数 埃斯顿 伺服驱动器源码;PCB;源理图;BOM;技术参数 埃斯顿 伺服驱动器源码;PCB;源理图;BOM;技术参数;资料齐全可直接生产 250
- 基于用户的协同过滤购物系统 协同过滤网上购物 协同过滤商城系统 推荐原理:根据用户拿后记录计算用户相似度,将相似度高的用户的拿后进行互相推荐 技术栈:springboot mybatis jsp my
- 西门子1200程序双相机4轴多工位检测设备,KTP700触摸屏,仅供电气编程者学习借鉴 程序主要有,上下双工位4轴脉冲控制步进电机; 与上位机双相机的TCP IP通讯;有一台第三设备的modbus r
- 基于时间和空间的大规模电动汽车入网网损调度 建立MISOCP模型,分时段优化,并行计算(实时优化) 并对比了优化和未优化结果,验证了调度的有效性 考虑到电动汽车的机动性,市区可分为三类功能区:住宅
- 异步电机无速度传感器控制仿真 全部采用sfunction搭建 可以赠送有速度传感器控制 图片为正反转转速零穿波形
- 基于matlab语音信号处理,针对采集的语音信号,观察其时域、频域波形,然后分别通过抽取,内插操作,结合处理后的时频域波形,分析了抽取与内插对信号的影响 最后分别设计了两个模拟滤波器,并利用脉冲响应
- K7+6678信号处理板 方案 原理图 pcb
- 基于fpga的qam调制解调器设计
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


