
IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 23, NO. 6, NOVEMBER 2008 2915
Advanced Boundary Control of Inverters
Using the Natural Switching Surface:
Normalized Geometrical Derivation
Martin Ordonez, Student Member, IEEE, John E. Quaicoe, Senior Member, IEEE, and Mohammad Tariq Iqbal
Abstract—A curved switching surface (SS) for inverters control
with superior characteristics is geometrically derived in this pa-
per. In order to avoid inaccuracies introduced by simplification or
assumptions, the analysis is performed entirely using a versatile
geometrical method in the normalized domain. Unlike previous
approaches, both the output voltage and the capacitor current are
considered as varying references to establish a more accurate con-
trol law with enhanced performance. The proposed normalization
technique provides remarkable insight into the behavior of system,
the leading to a pure geometrical treatment that is general and ap-
plicable to any possible inverter. As a result of a rigorous analysis,
a control law for inverters defined as natural SS is proposed and
thoroughly characterized. In addition to the enhanced dynamic re-
sponse, fixed-frequency operation is one of the key features of the
proposed control scheme. In order to formally demonstrate fixed-
frequency operation, a transformation from the natural SS to its
pulsewidth modulation (PWM) equivalent is performed, revealing
duality between boundary control using curved SS and traditional
PWM. This is a significant advancement toward the unification
and understanding of traditional modulation against modulation
produced by curved SSs. Finally, an additional novel concept is
explored: operation in mixed monopolar and bipolar mode using
the natural SS. This new mixed operating mode overcomes physical
limitations of the inverter structure in monopolar mode around the
region of zero voltage cross (both the problem identification and so-
lution are investigated). Experimental results of a 1.5-kVA inverter
operating at fixed moderate frequency are presented to validate the
natural SS performance, illustrate the benefits of the normalization
technique, and demonstrate the monopolar and mixed operating
mode.
Index Terms—Boundary control, curved, inverter, nonlinear
control, switching surface.
I. INTRODUCTION
B
UCK-DERIVED inverters, full- and half-bridge topolo-
gies, can be classified as simple cases of a variable structure
system that can be controlled by boundary or geometric con-
trol [1]–[6]. Among boundary controllers, a sliding mode using
linear control laws and a hysteresis band has been investigated
extensively for both dc–dc buck converters and buck-derived
inverters [5]–[14]. Under this control scheme, the state vari-
Manuscript received November 27, 2007; revised February 20, 2008. First
published November 17, 2008; current version published December 9, 2008.
This work was supported by the Natural Sciences and Engineering Research
Council (NSERC), Canada. Recommended for publication by Associate Editor
J. Espinoza.
The authors are with the Faculty of Engineering and Applied Science, Memo-
rial University of Newfoundland, St. John’s, NL A1B 3X5, Canada (e-mail:
mordonez@ieee.org).
Color versions of one or more of the figures in this paper are available online
at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TPEL.2008.2005378
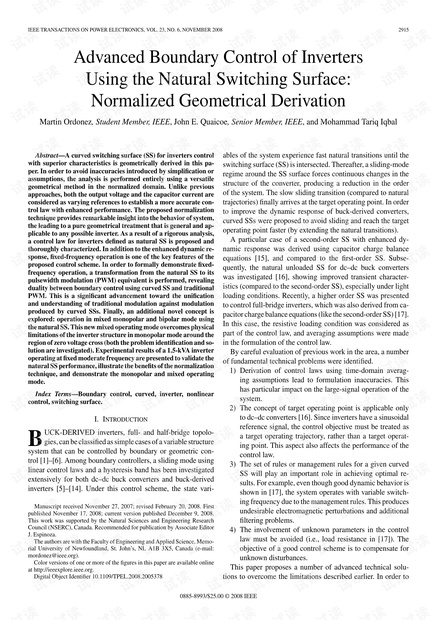
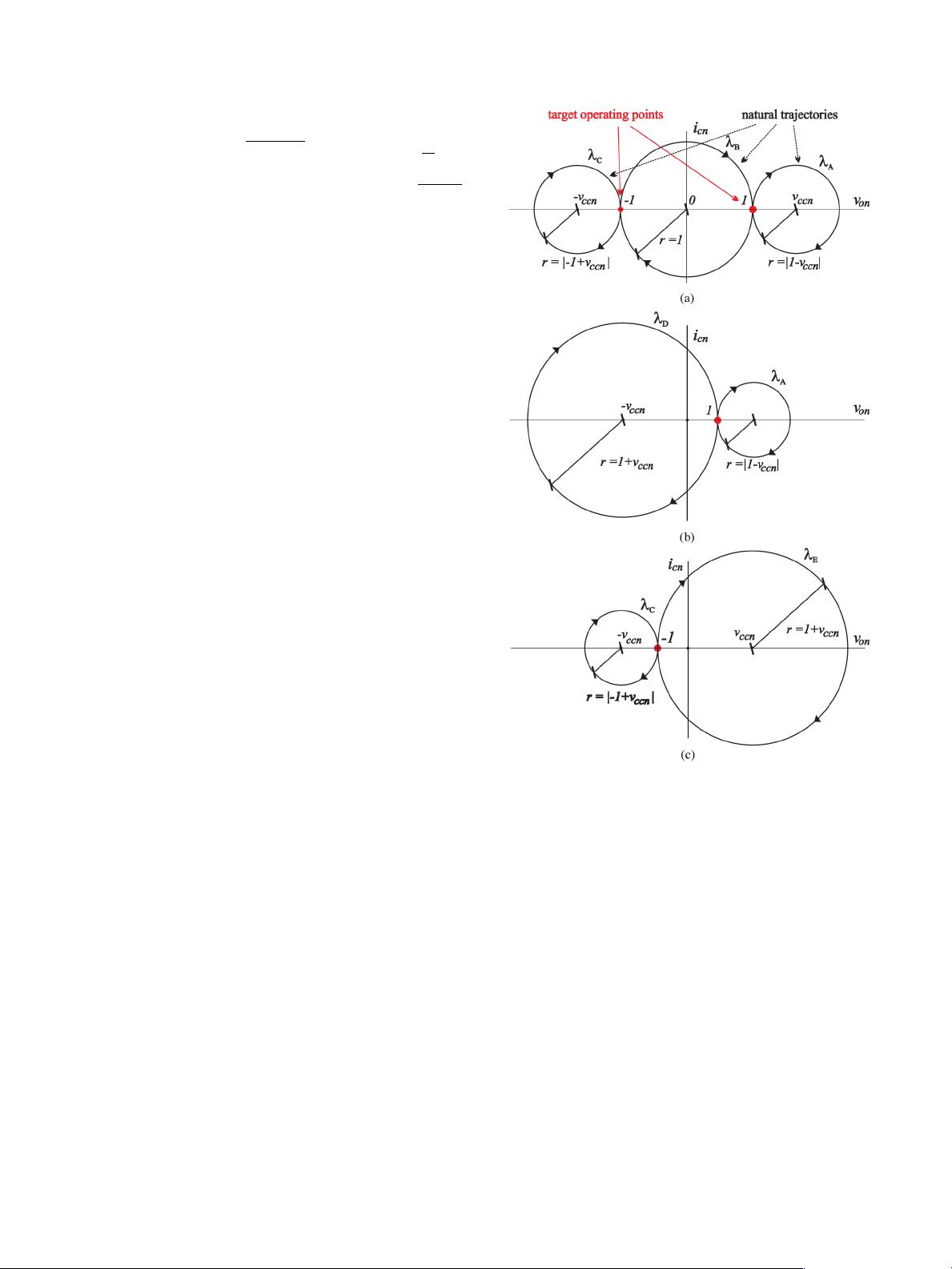
ables of the system experience fast natural transitions until the
switching surface (SS) is intersected. Thereafter, a sliding-mode
regime around the SS surface forces continuous changes in the
structure of the converter, producing a reduction in the order
of the system. The slow sliding transition (compared to natural
trajectories) finally arrives at the target operating point. In order
to improve the dynamic response of buck-derived converters,
curved SSs were proposed to avoid sliding and reach the target
operating point faster (by extending the natural transitions).
A particular case of a second-order SS with enhanced dy-
namic response was derived using capacitor charge balance
equations [15], and compared to the first-order SS. Subse-
quently, the natural unloaded SS for dc–dc buck converters
was investigated [16], showing improved transient character-
istics (compared to the second-order SS), especially under light
loading conditions. Recently, a higher order SS was presented
to control full-bridge inverters, which was also derived from ca-
pacitor charge balance equations (like the second-order SS) [17].
In this case, the resistive loading condition was considered as
part of the control law, and averaging assumptions were made
in the formulation of the control law.
By careful evaluation of previous work in the area, a number
of fundamental technical problems were identified.
1) Derivation of control laws using time-domain averag-
ing assumptions lead to formulation inaccuracies. This
has particular impact on the large-signal operation of the
system.
2) The concept of target operating point is applicable only
to dc–dc converters [16]. Since inverters have a sinusoidal
reference signal, the control objective must be treated as
a target operating trajectory, rather than a target operat-
ing point. This aspect also affects the performance of the
control law.
3) The set of rules or management rules for a given curved
SS will play an important role in achieving optimal re-
sults. For example, even though good dynamic behavior is
shown in [17], the system operates with variable switch-
ing frequency due to the management rules. This produces
undesirable electromagnetic perturbations and additional
filtering problems.
4) The involvement of unknown parameters in the control
law must be avoided (i.e., load resistance in [17]). The
objective of a good control scheme is to compensate for
unknown disturbances.
This paper proposes a number of advanced technical solu-
tions to overcome the limitations described earlier. In order to
0885-8993/$25.00 © 2008 IEEE


剩余15页未读,继续阅读
资源评论


pk_xz123456
- 粉丝: 2968
- 资源: 4150









最新资源
- VCU整车控制器 ,量产模型搭配底层软件 ,某知名电动汽车 量产VCU模型搭配英飞凌tc234底层驱动软件,可完成编译烧写,运行 服务一:应用层模型, 服务二:信号矩阵协议,信号接口定义表 服务
- 汇川H3U标准程序,程序有本体脉冲控制的三轴定位,有总线控制的汇川伺服定位,轴点动,回零,相对定位绝对定位,程序结构清晰,分模块控制,是工控者学习的好案例
- 考虑电动汽车可调度潜力的充电站两阶段市场投标策略-matlab代码 通过对电动汽车集群压缩,建立日前预测模型和实时可调度模型 考虑充电站间的非合作博弈,建立充电站的策略投标模型 基于日前报价和实时
- Stm32f334高精度定时器源代码,高精度定时器的全桥移相输出 4路PWM,实时刷新移相角度和频率 注意只是代码 只是代码
- 公司开发低成本USB串口转CAN通讯盒,其他项目优先,停止开发,自己闲暇时间继续开发而成 出资料 主控是stm32f103c8t6,整套资料,很适合初学者学习上下位机通讯控制入门,也有dll调用控制学
- stm32电磁寻迹智能车,HAL库,cubeMX配置,寻迹程序代码工程,stm32f411程序,小车底板集成pcb,三叉,归一化,差比和,滤波算法,分段pid,已完成 有pcb原理图,另外程序代码注释
- 行车记录仪方案,包括原理图、pcb图、android app以及ios app源码
- 标题: 基于Matlab的rgb图像静态手势识别 - 关键词:matlab GUI界面 静态手势识别 hog特征 模板对比 - 步骤: - rgb静态检测:打开图像 皮肤阈值分割 连通域计算
- 小电流单相接地系统 故障选线 MATLAB仿真 Simulink模型 三线故障选线 有中性点经消弧线圈接地系统,不接地系统,模式切 仿真有理论支撑和仿真波形 可进一步进行研究
- 基于S7-200 PLC和组态王组态水箱液位控制系统 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
- Excel文件LabVIEW库,xlsx格式,可读可写可设置颜色,运行稳定,源代码提供
- 两台欧姆龙CP1H相互通讯交数据通过脉冲控制6轴伺服案例,实际项目 PLC采用两台CP1H-X40D带RS232通讯板CP1W-CIF01.使用PC LINK主从通信 OMRON触摸屏是NB7W
- MATLAB代码:基于储能电站服务的冷热电多微网系统双层优化配置 关键词:储能电站 共享储能电站 冷热电多微网 双层优化配置 参考文档:《基于储能电站服务的冷热电多微网系统双层优化配置》复现
- MATLAB代码:电-气-热综合能源系统耦合优化调度 关键词:综合能源系统 优化调度 电气热耦合 参考文档:自编文档,非常细致详细 仿真平台:MATLAB YALMIP+cplex gurobi
- 永磁同步电机(PMSM)无差拿预测电流控制仿真
- 基于三菱 PLC和组态王的污水处理PH调节系统 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


