
Attention-Guided Pyramid
Context Networks for
Detecting Infrared Small Target
Under Complex Background
TIANFANG ZHANG
University of Electronic Science and Technology of China, Chengdu,
China
LEI LI
University of Copenhagen, Kobenhavn, Denmark
SIYING CAO
TIAN PU
ZHENMING PENG
University of Electronic Science and Technology of China, Chengdu,
China
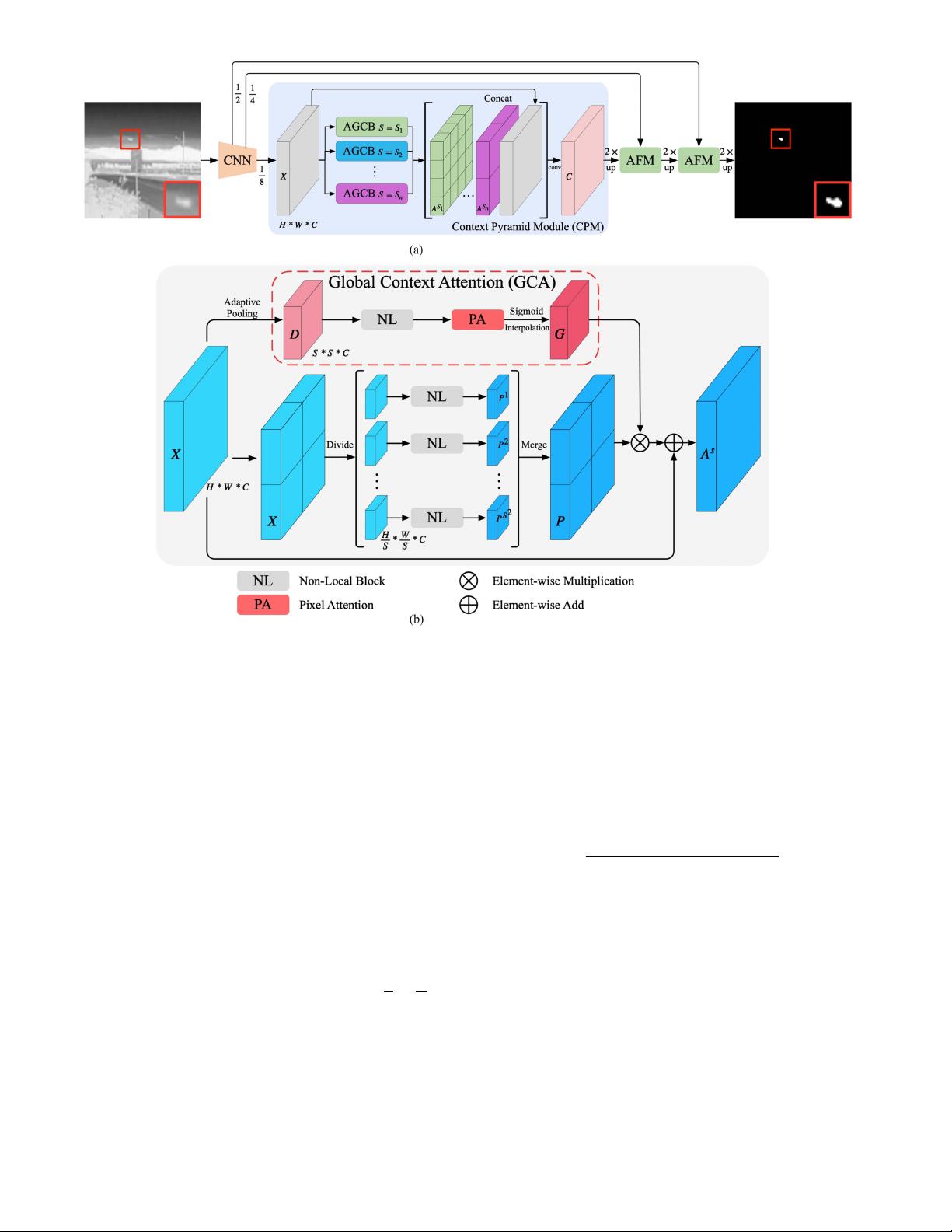
Infrared small target detection techniques remain a challenging
task due to the complex background. To overcome this p roblem, by
exploring context information, this research presents a data-driven ap-
proach called attention-guided pyramid context network (AGPCNet).
Specifically, we design attention-guided context block and perceive
pixel correlations within and between patches at specific scales via
local semantic association and global context attention, respectively.
Then, the contextual information from multiple scales is fused by
Manuscript received 11 April 2022; revised 12 October 2022; accepted 14
January 2023. Date of publication 23 January 2023; date of current version
9 August 2023.
DOI. No. 10.1109/TAES.2023.3238703
Refereeing of this contribution was handled by K. Peter Judd.
This work was supported in part by the Natural Science Foundation of
Sichuan Province of China under Grant 2022NSFSC40574, in part by the
Sichuan Science and Technology Program under Grant 2022YFG0178 and
in part by the National Natural Science Foundation of China under Grant
61775030, and Grant 61571096.
Authors” addresses: Tianfang Zhang, Siying Cao, Tian Pu and Zhen-
ming Peng are with the School of Information and Communication En-
gineering, University of Electronic Science and Technology of China,
Chengdu 611731, China, and also with the Laboratory of Imaging
Detection and Intelligent Perception, University of Electronic Science
and Technology of China, Chengdu, 611731, China, E-mail: (spark-
carleton@gmail.com; caosiying3008@gmail.com; putian@uestc.edu.cn;
zmpeng@uestc.edu.cn); Lei Li is with Department of Computer Sci-
ence, University of Copenhagen, Kobenhavn 1165, Denmark, E-mail:
(lilei@di.ku.dk). (Corresponding author: Zhenming Peng.)
The source codes are available at https://github.com/Tianfang-Zhang/
AGPCNet.
0018-9251 © 2023 IEEE
context pyramid module to achieve better feature representation. In
the upsampling stage, we fuse the low and deep semantics through
asymmetric fusion module to retain more information about small tar-
gets. The experimental results illustrate that AGPCNet has achieved
state-of-the-art performance on three available infrared small target
datasets.
I. INTRODUCTION
Infrared small target detection techniques have been
widely used in many applications including early warn-
ing, marine rescue, and accurate guidance [1], [2]. These
applications require accurate information about the target
of interest. Due to the long imaging distances, infrared
targets only occupy very few pixels. The particular imaging
characteristics result in lacking color, shape, and texture
information in the infrared images. Furthermore, complex
backgrounds, structured clutter and random noise also cause
defective impact on target detection [3], [4]. Therefore,
infrared target detection technology still remains a chal-
lenging problem [5], [6] with these disturbing factors.
Infrared small target detection techniques can be divided
into two categories: 1) model driven; 2) data driven. Model-
driven approaches manually design algorithms based on
hypotheses about the physical properties of infrared targets.
These methods can be further split into three subcategories
as follows: 1) background suppression-based approaches
assume that the presence of a target breaks the continuity
of infrared images [7], [8]; 2) human visual system-based
approaches assume that the saliency of a target is only re-
lated to the local contrast of its surroundings [9], [10], [11],
[12]; 3) optimization-based approaches transform the target
detection task into a sparse low-rank tensor decomposition
problem [13], [14], [15], [16], [17], [18]. They heavily rely
on handcrafted features and are, therefore, difficult to detect
robustly when coping with complex scenes.
Data-driven approaches combining neural networks and
public datasets [19], [20] can automatically extract features
to detect targets. Miss detection vs. false alarm condi-
tional generative adversarial network (MDvsFA cGan) [20]
trained generators in both miss detection and false alarm
perspectives using generative adversarial network. Asym-
metric contextual modulation (ACM) [19] designed feature
fusion modules in the encoder-decoder structure for both
low and deep semantic, obtaining a more efficient feature
representation. Attentional local contrast network (ALC-
Net) [21] simulates local contrast through shift operations of
semantic tensors with a view to extracting local information
about the target. Although they have achieved state-of-the-
art performance, most of them have ignored the context
information and correlation between feature pixels. This
leaves the capabilities of the neural network underutilized
and can lead to the loss of detection targets.
It is worth mentioning that investigation about feature
pixel correlation in the field of visible images [22], [23], [24]
are paid more attention. However, there is a very significant
difference between infrared small targets and visible targets.
The characteristics of infrared data, such as the lack of
color information and the small target area, determine that
the long-range pixel dependence highlighted in previous
4250 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 59, NO. 4 AUGUST 2023
Authorized licensed use limited to: NANJING UNIVERSITY OF AERONAUTICS AND ASTRONAUTICS. Downloaded on September 25,2024 at 13:18:48 UTC from IEEE Xplore. Restrictions apply.

剩余11页未读,继续阅读
资源评论


pk_xz123456
- 粉丝: 2967
- 资源: 4150









最新资源
- HFSS平面倒F(PIFA)天线 GSM900单频PIFA天线、GSM900和DCS1800双频PIFA天线 天线模型,附带结果,可改参数
- HFSS双频单极子极子天线 天线模型,附带结果,可改参数
- HFSS印刷偶极子天线 天线模型,附带结果,可改参数
- HFSS半波偶极子天线 天线模型,附带结果,可改参数
- 二维水力图出图,三维建模流体机械仿真,泵 水轮机 液力透平
- pscad三相输电线路合空线切空线过电压合闸电阻法抑制过电压 定制直流输电差动保护 用pscad搭个220kv三相空载输电线路,仿真合空线,切空线过电压,仿真避雷器,合闸电阻法抑制合闸过
- 基于FPGA的CIC滤波器抽取内插滤波器数字上下变频多采样率信号处理 级联积分梳 状(CIC) 滤波器是一类硬件效率高的线性相位有限脉冲响应 (FIR) 数字滤波器 CIC 滤波器无需使用乘法器即可
- STM32 IAP固件升级程序源代码 STM32通过串口,接 收上位机、APP、或者服务器来的数据,更新设备的固件,也就是说上位机端可以通过wifi转串口,网口转串口,GPRS转串口模块等,给这个S
- 电动汽车模型的各模块的Simulink模型,包括驾驶员模块,整车控制器模块,电机模块,变速器模块,主减速器模块,车轮模块,车速模块以及BMS模块 附有说明文档,文档详细的描述了模型的建模过程及功能
- 西门子S1200 PID 恒温恒压供冷却水程序.霍尼韦尔电动比例 阀PID控制水温,与两台西门子v20变频器PID控制水压. 包括程序和Eplan源档图纸.图纸和程序都是自用模板
- Comsol熊猫光纤应力传感分析 固体力学和光学模块多物理场耦和
- MATLAB 代码:多能互补热电联供型微网优化,完美复现,注释很详细
- Simulink 内置永磁同步电机滑模控制器,滑模观测器研究 基于永磁同步电机 以及拓展应用
- 基于S7-200 PLC全自动工业洗衣机控制系统 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
- S7-200 MCGS 基于PLC模拟城轨自动票机控制 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
- 三菱PLC程序MCGS触摸屏组态材料自动分拣控制系统 带解释的梯形图程序,接线图原理图图纸,io分配,组态画面
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


