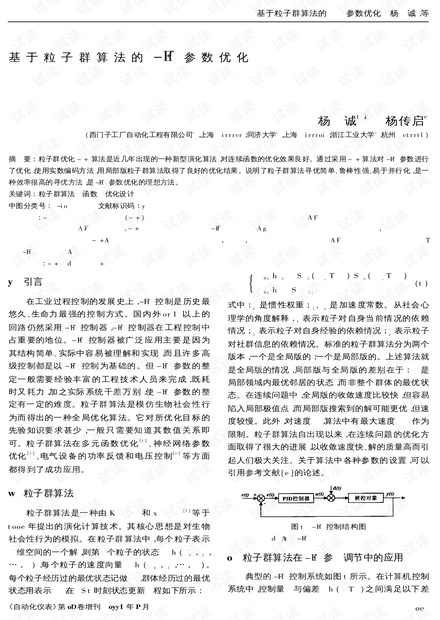
粒子群优化算法(Particle Swarm Optimization, PSO)是一种群体智能优化算法,它模拟鸟群觅食的行为。在自动控制系统领域,PID(比例-积分-微分)控制器是一种常见的反馈回路控制器,广泛应用于工业过程控制中。PID控制器参数(比例增益Kp、积分增益Ki、微分增益Kd)的选择对于控制系统的性能至关重要。因此,如何自动且高效地对PID参数进行优化成为研究的热点。
基于粒子群算法的PID参数优化是将粒子群优化算法应用于PID参数的寻优过程中。粒子群算法通过个体粒子在解空间中的运动,通过协作与竞争机制来寻找最优解。在PID参数优化场景中,每个粒子代表一组可能的PID参数设置,而粒子群通过追踪个体经验最优解和群体经验最优解来调整参数,最终找到能够使得系统性能指标(如快速响应、稳定性、最小超调量等)达到最佳的PID参数组合。
在研究文档中提到的文献,如文献编号***中,研究人员很可能探讨了如何运用粒子群算法来解决PID控制器参数优化问题。PSO算法因其简单、易于实现和计算效率高等优点而受到青睐。在算法执行过程中,每个粒子都有一个位置和速度属性,位置代表了问题的潜在解(PID参数),速度决定了粒子在搜索空间中的移动方向和步长。粒子会根据自己的经验(个体最优位置)和群体的经验(全局最优位置)来更新自己的速度和位置。
粒子群算法的基本思想是,粒子通过学习个体最优解和群体最优解来动态调整自己的运动方向和速度。具体来说,粒子通过比较当前状态与个体历史最优状态和群体历史最优状态,从而获取搜索空间中的信息。在优化PID参数的过程中,群体最优解代表着在所有粒子中找到的最好一组PID参数,个体最优解则代表单个粒子在参数空间中找到的最好解。粒子的搜索行为通过迭代更新进行,每迭代一次,粒子的位置就可能发生变化,直至满足终止条件(如达到最大迭代次数、参数调整范围或参数的适应度达到一定的阈值)。
PID参数优化的目的是要使得控制器的性能指标达到最优,例如缩短系统响应时间、提高控制精度、减少或消除超调量以及增强系统的抗干扰能力等。PID参数的优化过程本质上是一个多目标优化问题,可能需要考虑到多个性能指标,并且要找到一组既能满足快速响应又能保证系统稳定性和准确控制的参数。
在工程实践中,为了使基于粒子群算法的PID参数优化更加有效,通常需要对PSO算法进行一些调整或改进,比如引入惯性权重、学习因子等参数来控制粒子的探索和利用行为,或者与其他算法(如遗传算法、模拟退火等)结合,形成混合优化算法,以提高寻优的效率和优化结果的质量。
此外,文档中还提到了一些参考文献和年份,如IEEE的相关出版物,这暗示了该领域的研究不仅涉及理论的探讨,还包括了与实际应用密切相关的实验和案例研究。由于文档内容的OCR扫描结果存在部分文字识别错误或漏识别,具体的参考文献和年份需要结合上下文进行更准确的解读,但它们很可能提供了研究的背景、理论支持以及具体实施细节。
基于粒子群算法的PID参数优化是一个将智能优化算法应用于控制系统设计的交叉学科研究领域。它不仅涉及到了智能优化算法的核心理论,还包括了控制系统分析、建模以及性能评估等多方面知识,是自动控制和计算智能两个领域的重要结合点。