在研究基于MATLAB的模糊控制仿真时,涉及的知识点主要包括模糊控制系统的结构、设计原理以及MATLAB仿真工具的使用方法。模糊控制系统是一个采用模糊集合理论、模糊语言变量以及模糊逻辑推理的计算机控制方法,它主要应用于处理那些难以用精确数学模型描述的复杂问题。
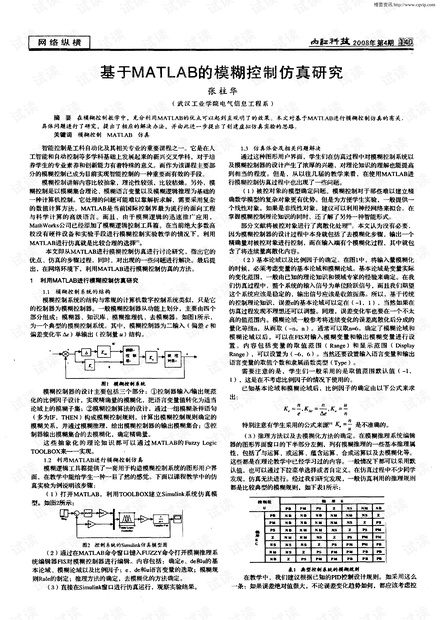
模糊控制系统通常包含四个基本功能组件:模糊器、知识库、模糊推理机和去模糊器。模糊器的作用是将输入的精确量转化为模糊集合;知识库负责存储有关模糊控制的知识和经验规则;模糊推理机根据输入的模糊集合和知识库中的规则进行逻辑推理,得到输出的模糊集合;去模糊器则将模糊集合转化为精确的控制量,供控制系统使用。
在使用MATLAB进行模糊控制仿真时,主要借助了其提供的模糊逻辑工具箱Fuzzy Logic Toolbox。该工具箱提供了一整套构造模糊控制系统的图形用户界面,这使得在教学中能够直观明了地展示模糊控制系统的结构和控制策略。通过MATLAB的Simulink系统仿真模型,可以建立起模糊控制系统,并进一步通过模糊推理系统编辑器FIS对模糊控制器进行设计和编辑。设计过程包含确定输入输出变量的基本论域和模糊论域,选择语言变量,制定模糊规则,以及确定推理和去模糊化方法。
模糊控制仿真过程中可能会遇到的问题包括如何确定被控对象的模型,以及基本论域和比例因子的设定。由于模糊控制尤其适用于难以建立精确模型的复杂系统,因此在教学实践中,通常会使用线性对象作为被控对象。对于非线性对象,可以采用神经网络等方法进行拟合。同时,为了在仿真中对输入变量进行模糊化处理,需要根据理论知识和专家经验确定变量的基本论域,并结合期望的系统响应特性设定模糊论域。误差的基本论域和模糊论域通常可以分别设定为(-1,1)和(-n,n),其中n代表误差离散化的等级数,一般取值为6。
MATLAB模糊逻辑控制工具箱的使用,极大地降低了模糊控制仿真实验的难度,为高校提供了在没有硬件设备和实验手段的情况下进行模糊控制实验教学的可能。通过模拟仿真,学生不仅能够更好地理解模糊控制的理论知识,而且能够激发对模糊控制设计的兴趣。
总结来说,本文通过对基于MATLAB进行模糊控制仿真的研究,阐述了模糊控制系统的结构设计、MATLAB仿真工具的使用方法,以及在仿真过程中可能遇到的问题和解决办法。这些内容对于掌握模糊控制仿真技术,以及提升学生在智能控制领域的学习和创新能力具有重要的指导意义。