控制工程基础
需积分: 0 171 浏览量
更新于2014-05-14
收藏 164KB DOC 举报
### 控制工程基础知识点概述
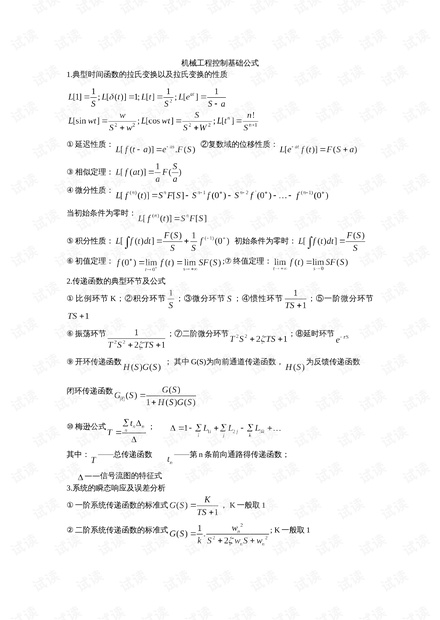
#### 一、拉氏变换及其性质
在控制工程领域,拉氏变换是一种非常重要的数学工具,它能够将时域中的微分方程转换到复频域中的代数方程,从而简化问题的求解过程。
- **延迟性质**:如果一个信号\( f(t) \)经过时间\( T \)的延迟,那么其拉氏变换为\( e^{-sT}F(s) \),其中\( F(s) \)是原信号\( f(t) \)的拉氏变换。
- **复数域的位移性质**:对于一个已知拉氏变换\( F(s) \)的函数\( f(t) \),若对其进行复数域的位移,则得到新的函数\( e^{at}f(t) \),其拉氏变换为\( F(s-a) \)。
- **相似定理**:如果函数\( f(t) \)与\( f(at) \)(\( a > 0 \))之间的关系满足一定条件,那么它们的拉氏变换之间也存在相似关系。
- **微分性质**:对于函数\( f(t) \)的一阶导数\( f'(t) \)或更高阶导数\( f^{(n)}(t) \),其拉氏变换可以通过原始函数的拉氏变换来表示。例如,当初始条件为零时,\( f'(t) \)的拉氏变换为\( sF(s) \)。
- **积分性质**:函数\( f(t) \)的积分\( \int_0^t f(\tau)d\tau \)的拉氏变换可以通过原始函数的拉氏变换来表示。同样地,当初始条件为零时,积分函数的拉氏变换为\( \frac{1}{s}F(s) \)。
- **初值定理**:给出了函数\( f(t) \)在\( t=0^+ \)时刻的值与其拉氏变换的关系,即\( f(0^+) = \lim_{s\to\infty}sF(s) \)。
- **终值定理**:提供了函数\( f(t) \)在\( t\to\infty \)时的极限值与其拉氏变换之间的关系,即\( \lim_{t\to\infty}f(t) = \lim_{s\to0}sF(s) \)。
#### 二、传递函数的典型环节及公式
传递函数是控制理论中用来描述系统动态特性的基本工具之一,它是系统输出与输入之间的复数域比例系数。根据不同的物理模型,可以归纳出以下几种典型的传递函数环节:
- **比例环节** \( K \):表示系统增益,输出与输入成正比。
- **积分环节** \( \frac{1}{s} \):表示系统对输入的累积效应。
- **微分环节** \( s \):表示系统对输入的变化率敏感。
- **惯性环节** \( \frac{1}{Ts+1} \):描述了系统对于输入变化的滞后反应。
- **一阶微分环节** \( Ts+1 \):结合了比例和微分的作用。
- **振荡环节** \( \frac{\omega_n^2}{s^2+2\zeta\omega_ns+\omega_n^2} \):描述了具有阻尼特性的二阶系统的动态行为。
- **二阶微分环节** \( s^2 \):类似于加速作用。
- **延时环节** \( e^{-sT} \):表示系统输出相对于输入有一个时间上的延迟。
#### 三、系统的瞬态响应及误差分析
系统的瞬态响应是指系统在外部输入作用下,从一种状态过渡到另一种状态的过程中的响应情况。常见的系统包括一阶系统和二阶系统。
- **一阶系统**:其传递函数可以表示为\( \frac{K}{\tau s+1} \),其中\( K \)通常取为1。
- **二阶系统**:其传递函数可以表示为\( \frac{K\omega_n^2}{s^2+2\zeta\omega_ns+\omega_n^2} \),\( K \)通常也取为1。
针对这些系统,可以计算出一系列重要的性能指标,如上升时间、峰值时间、超调量、调整时间和稳态误差等。
- **上升时间** \( t_r \):从响应曲线首次达到并保持在最终稳态值的10%到90%的时间间隔。
- **峰值时间** \( t_p \):从响应曲线开始到第一次到达最大值所需的时间。
- **超调量** \( \sigma\% \):最大峰值与目标值之差与目标值的比例百分比。
- **调整时间** \( t_s \):响应曲线进入并保持在一个特定误差带内所需的最短时间。
- **稳态误差** \( e_{ss} \):系统稳态响应与期望值之间的偏差。
#### 四、系统的频率特性
系统的频率特性是指系统对不同频率的正弦波输入信号的响应特性,主要包括幅频特性和相频特性。
- **伯德图**:用于表示系统幅频特性和相频特性的图形。
- 比例环节的伯德图中,增益为常数,相角为0度。
- 积分环节的伯德图中,增益随频率增加而减小,相角为-90度。
- 微分环节的伯德图中,增益随频率增加而增加,相角为90度。
- 惯性环节的伯德图中,增益随频率增加而减小,相角逐渐变为-90度。
- 一阶微分环节的伯德图中,增益随频率增加而增加,相角逐渐变为90度。
- **乃奎斯特图**:用于表示系统在复平面上的频率响应,可以直观地判断系统的稳定性。
- 振荡环节的乃奎斯特图中,随着频率的变化,曲线将在复平面上形成一个圆。
- **频域性能指标**:
- 谐振峰值\( M_r \):系统频率响应的最大值。
- 谐振频率\( \omega_r \):系统达到谐振峰值时的频率。
- 截止频率\( \omega_c \):系统幅频特性下降到-3dB点时的频率。
#### 五、系统的相对稳定性
系统的相对稳定性可以通过奈奎斯特稳定判据和伯德图中的相位裕量和幅值裕量来评估。
- **相位裕量** \( \gamma \):系统在截止频率处的相角与-180度的差距。
- **幅值裕量** \( GM \):系统在相角为-180度时的增益裕量。
#### 六、PID校正
PID控制器是一种常用的闭环控制系统,它通过比例(P)、积分(I)和微分(D)三个部分来调整控制量,以实现对被控对象的有效控制。
- **比例控制**:直接与误差成正比。
- **积分控制**:积累误差以消除静态误差。
- **微分控制**:预估未来趋势以减少超调和改善动态性能。
PID控制器的传递函数形式通常表示为:\[ G_{PID}(s) = K_p + \frac{K_i}{s} + K_ds \]
通过合理设置PID参数\( K_p \)、\( K_i \)和\( K_d \),可以有效提高系统的控制性能和稳定性。
190 浏览量
130 浏览量
139 浏览量
127 浏览量
2010-01-06 上传
146 浏览量
资源评论


qq_15371623
- 粉丝: 0
- 资源: 1









