Simulink是MATLAB的一个集成环境,它提供了使用图形化拖放界面来构建和模拟动态系统模型的工具。Simulink可以用来模拟各种系统,包括连续系统、离散系统和混合系统,广泛应用于控制工程、信号处理、通信系统等领域。在Simulink环境中,用户可以通过组装不同的模块来搭建系统模型,并进行仿真分析。
在Simulink模块中,每个模块都可以代表系统中的一个功能单元。例如,一个简单的数学函数、一个复杂的子系统、或者是物理运动模型等。用户通过模块之间的信号线将它们连接起来,形成完整的动态系统模型。
Simulink模块大致可以分为以下几种类型:
1. 源模块(Sources):这类模块用于产生系统中的输入信号,例如常数信号发生器(Constant)、正弦波信号发生器(Sine Wave)等。
2. 宿模块(Sinks):与源模块相对,宿模块用于接收系统中的输出信号,用于观察、记录或显示仿真结果,例如示波器(Scope)、信号显示(Display)等。
3. 功能模块(Functions):功能模块用于实现系统的各种运算和控制逻辑,如加法器(Gain)、乘法器(Product)、积分器(Integrator)和控制器(如PID Controller)等。
4. 信号操纵模块(Signal Routing):这类模块用来管理信号的流向,例如开关模块(Switch)、Mux(多路复用器)和Demux(多路分解器)等。
5. 信号属性模块(Signal Attributes):用于设置或修改信号的属性,如数据类型转换(Data Type Conversion)、信号大小调整(Relational Operator)等。
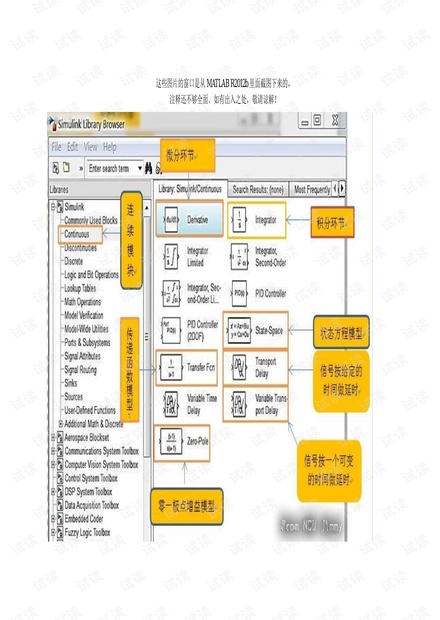
6. 连续与离散模块(Continuous & Discrete):代表了系统中连续和离散的动态特性,连续模块通常与微分方程有关,如积分器(Integrator)、微分器(Derivative)等;离散模块则用于描述离散时间系统的特性,如延迟单元(Unit Delay)、Z变换(ZOH)等。
7. 子系统模块(Subsystems):允许用户创建包含多个模块的模块组,作为封装起来的单元使用,提高了模型的组织性和重用性。
Simulink提供了丰富的模块库,模块的图标往往直观地反映了该模块的功能。比如,源模块的图标可能显示了信号的波形,而宿模块的图标可能会显示一个观测屏幕的图形。通过使用这些模块,用户可以建立起一个复杂的动态系统的模型,并通过设置参数和仿真运行来分析系统行为。
在搭建模型时,用户首先需要根据系统需求从Simulink库中选择合适的模块,并在Simulink的画布上进行拖放。然后,通过鼠标拖动连接线将这些模块的端口相连,以确保信号在模块之间的正确传递。此外,用户还需为每个模块设置相应的参数,比如增益的大小、信号的频率等。
Simulink的仿真过程通常包括初始化、积分、输出计算和终止等阶段。在仿真之前,用户需要设置仿真的开始和结束时间、选择积分器和求解器等。在仿真的过程中,Simulink会实时计算系统状态,并更新模块间的信号值。
由于Simulink支持连续和离散的仿真,因此用户在仿真模型时需注意信号和模块的特性。连续模块处理的是连续时间信号,适用于物理、机电等领域。而离散模块则适合于数字信号处理、计算机控制系统等需要对信号进行抽样和处理的场合。
在MATLAB R2012b版本中,Simulink用户界面进行了较大的改进,提供了更加直观的模型导航和配置工具。同时,模块库也得到了更新,增加了更多新的模块以支持更加复杂和多样的仿真需求。
Simulink作为一种强大的系统仿真工具,为工程技术人员提供了一个方便快捷的平台来模拟和分析复杂系统的动态行为。通过使用Simulink模块,即使是初学者也能在较短的时间内快速构建起模型,并通过仿真来学习和验证系统的设计。