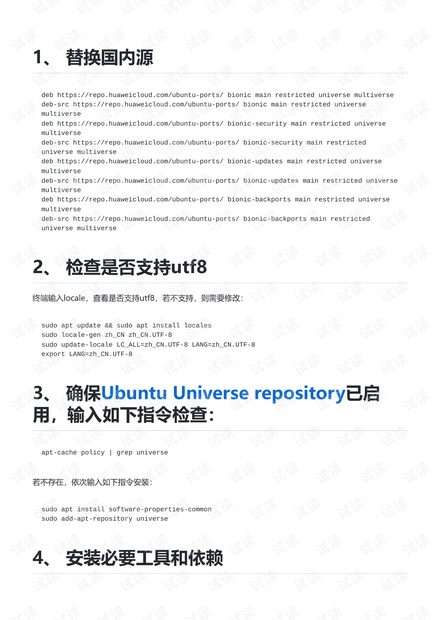

1、 替换国内源
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic main restricted universe multiverse
deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic main restricted universe
multiverse
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-security main restricted universe
multiverse
deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-security main restricted
universe multiverse
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-updates main restricted universe
multiverse
deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-updates main restricted universe
multiverse
deb https://repo.huaweicloud.com/ubuntu-ports/ bionic-backports main restricted universe
multiverse
deb-src https://repo.huaweicloud.com/ubuntu-ports/ bionic-backports main restricted
universe multiverse
2、 检查是否支持utf8
终端输入locale,查看是否支持utf8,若不支持,则需要修改:
sudo apt update && sudo apt install locales
sudo locale-gen zh_CN zh_CN.UTF-8
sudo update-locale LC_ALL=zh_CN.UTF-8 LANG=zh_CN.UTF-8
export LANG=zh_CN.UTF-8
3、 确保Ubuntu Universe repository已启
用,输入如下指令检查:
apt-cache policy | grep universe
若不存在,依次输入如下指令安装:
sudo apt install software-properties-common
sudo add-apt-repository universe
4、 安装必要工具和依赖

剩余7页未读,继续阅读

qq_41803293
- 粉丝: 1
- 资源: 10









最新资源
- 工具变量-中国省级新质生产力数据(2010-2023年).xlsx
- 工具变量-中国省级新质生产力数据(2010-2023年).dta
- linux批量配置防火墙脚本firewall.sh
- jdk8 开发者中文手册
- CANoe中如何定义 <结构体数组> 类型的系统变量
- 一个用 Python 实现的猜数字游戏源码,玩家需要在一定范围内猜出程序预设的数字,程序会根据玩家的猜测给出提示,直到玩家猜对为止
- ESP8266+OLED实时显示天气和时间
- 基于CAPL内置函数,提取DBC报文信号属性信息
- 特别推荐的是 mysqlclient-1.4.6-cp37-cp37m-win-amd64.whl 文件等,专为 Windows 64 位系统下的 Python 3.6 3.7 3.8 环境设计
- flink siddhi 资源jar包,flink与siddhi集成,实现对复杂事件的处理 在flink中直接引入即可
- 多领域视角下的Cursor概念解析:数据库、GUI和编程中的应用及作用
- 一个使用 Python 进行数据分析的源码,它读取一个包含学生成绩的 CSV 文件,计算每个学生的平均成绩,并找出平均成绩最高的学生
- es 8.17.0 apache-skywalking-apm-10.1.0,同时配合elasticsearch-8.17.0-windows-x86-64来作为存储 es持久化数据使用
- MySQL 安装与配置详细步骤介绍及用途
- 计算机视觉中YOLOv11的目标检测技术创新及广泛应用
- apache-skywalking-apm-10.1.0 elasticsearch-8.17.0-windows-x86-64andapache-skywalking-apm-10.1.0
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0