### PLC驱动控制步进电机的设计与实现
#### 一、引言
步进电机作为一种将脉冲信号转换成直线位移或角位移的执行元件,在自动化领域中扮演着重要的角色。通过精确控制输入脉冲的数量、频率以及通电相序,可以实现对步进电机输出位移、速度和方向的有效控制。这种精确可控性使得步进电机在各种工业应用中得到了广泛的使用。
另一方面,可编程逻辑控制器(Programmable Logic Controller, PLC)是一种专为工业环境设计的控制器,它基于微处理器,集成了计算机技术、自动控制技术和通信技术,能够提供简单易懂的操作界面和高度可靠的控制性能。本文主要探讨如何利用PLC来控制步进电机,包括设计原理、硬件配置和软件编程等方面的内容。
#### 二、步进电机的工作原理
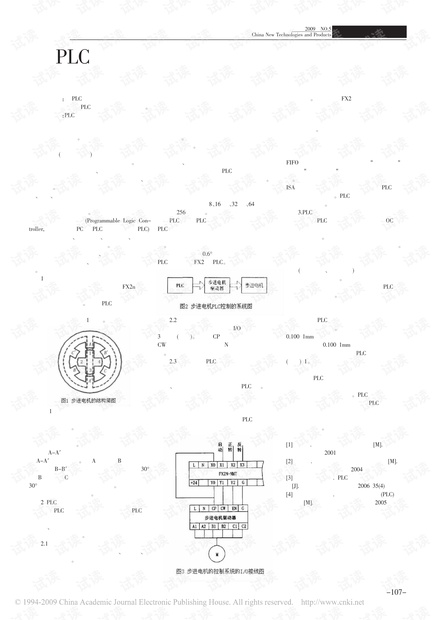
步进电机的工作原理是基于电磁效应。当定子上的绕组通电时,会产生一个激励磁场,该磁场与转子形成回路。如果转子与定子的齿没有对齐,磁力线会倾向于沿磁阻最小的路径移动,从而驱动转子旋转。例如,在图1所示的三相反应式步进电机中,当A相绕组通电时,转子在磁力的作用下迅速与A-A'重合而停止。当A相断电而B相通电时,转子顺时针转动一个特定的角度(通常是30°),以此类推。通过改变通电顺序,可以改变转子的旋转方向。
#### 三、PLC控制步进电机系统设计
在设计PLC控制步进电机系统时,首先需要明确系统的硬件构成及其工作原理。
##### 1. 硬件选型原则
- **步进电机**:选择合适的步进电机时需要考虑三个关键因素:步距角、静力矩和电流。根据控制精度要求选择步距角大小,根据负载大小确定静力矩,进而确定电机电流。
- **驱动器**:驱动器的选择主要取决于步进电机的相数和电流大小。为了提高电机运行性能和控制精度,通常会选择带有细分功能的驱动器。
- **PLC**:在选择PLC时,需要确保其具备高速脉冲输出功能,以便于控制步进电机的运行。本文案例中选择了三菱FX2系列PLC。
##### 2. 硬件连接
系统硬件连接是通过PLC输出脉冲信号控制步进电机的关键环节。在图3中,CP端子用于接收脉冲信号,CW端子用于接收方向信号,N端子作为使能信号输入端子。
##### 3. 软件设计
步进电机的控制程序可以通过梯形图语言或指令语言编写。控制程序可以在上位机中编写、调试并通过编译后下载到PLC中。程序设计中主要包括以下几个方面:
- **转速控制**:通过改变定时器的定时时间来控制输出脉冲的频率,从而实现对电机转速的调节。
- **转向控制**:通过交互界面的按钮与程序配合,可以轻松实现步进电机转向的切换。
- **步数控制**:利用PLC内部计数器来控制三拍的脉冲输出计数,进而控制步进电机的步数。
#### 四、PLC在步进电机驱动控制中的实现
在实际应用中,普通PLC虽然不具备高速脉冲输出口,但通常具备脉冲计数输入接口。通过合理的配置,可以有效地实现对步进电机的位置控制。例如,在机械运动机构上安装长光栅,并设置限位开关作为机械原点,这样就可以精确控制电机的运行位置。
PLC控制步进电机的设计与实现不仅涉及硬件的选择与连接,还需要通过软件编程来实现对电机运行参数的精确控制。这种控制方法在自动化生产线、精密加工设备等领域具有广阔的应用前景。