在本文中,我们将详细探讨基于STM32微控制器的智能物流分拣机器人的设计与实现。这个项目利用STM32微控制器作为主控芯片,通过结合硬件设计与嵌入式编程技术,创建了一个高效智能的物流分拣平台。
知识点1:STM32微控制器
STM32是STMicroelectronics(意法半导体)公司生产的一系列32位ARM Cortex-M微控制器产品。STM32系列因其高性能、低功耗、丰富的功能和合理的价格而广泛应用于嵌入式系统中。STM32通常使用Cortex-M内核,有多个系列,比如STM32F0、STM32F1、STM32L等,每个系列针对不同的应用场景。在智能物流分拣机器人项目中,STM32可以执行多种任务,如信号采集、控制识别、电机驱动控制等。
知识点2:物流分拣机器人硬件组成
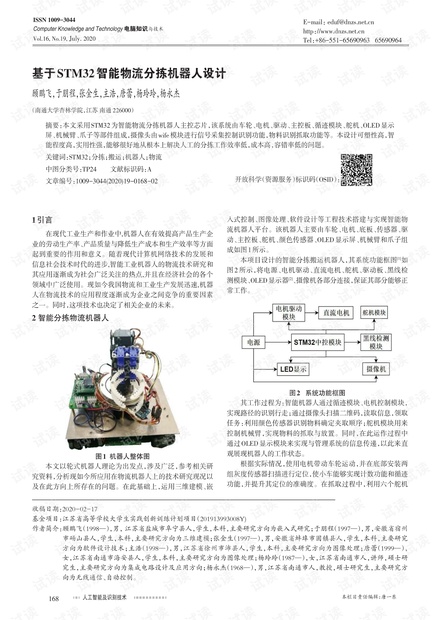
智能物流分拣机器人主要由车轮、电机、驱动、主控板、循迹模块、舵机、OLED显示屏、机械臂和爪子等部件组成。车轮和电机负责机器人的移动;驱动和主控板协同工作,确保机器人的动作协调;循迹模块负责路径识别行走;舵机和机械臂组合实现物料的抓取和放置;OLED显示屏用于展示工作状态和信息传递。
知识点3:系统功能与工作原理
系统功能框图展示了各个模块如何协同工作来完成分拣任务。循迹模块和电机控制模块允许机器人沿预定路径移动,摄像机扫描二维码或识别物料颜色来领取任务和确定夹取顺序。舵机模块通过控制机械臂角度和爪子的开合来抓取和搬运物料。OLED显示屏用于显示机器人的工作状态,实现与管理系统的信息交换。
知识点4:软件设计与控制流程
智能分拣物流机器人的软件设计涵盖了嵌入式控制、图像处理、软件设计等工程技术。软件设计部分包括电机控制程序、颜色识别、机械臂角度控制等子程序。在实际操作中,机器人首先使用循迹模块和电机控制模块识别路径并移动,然后通过摄像头识别二维码信息,确定分拣任务。利用颜色传感器,机器人可以准确判断物料颜色,并根据颜色信息确定物料的分拣顺序。通过舵机控制机械臂完成物料的抓取和放置。
知识点5:分拣效率和成本优势
文章提出,利用智能分拣物流机器人可以显著提高分拣效率,降低成本,解决人工分拣工作效率低、成本高、容错率低的问题。机器人可以24小时不间断工作,减少人力需求,提高准确率,从而为企业带来长期的成本节省。
知识点6:机器人技术在工业生产中的应用
机器人技术的应用在现代工业生产中具有重要意义。机器人能够有效提高生产率、产品质量,同时降低生产成本,提升生产效率。物流机器人在现代物流技术的应用程度逐渐成为企业间竞争的重要因素之一。在社会的各个领域中,这项技术的应用逐渐成为热点,并且在经济社会的发展中占据着核心地位。
知识点7:研究现状和存在的问题
文章提到,物流机器人技术是当前研究的热点,但同时也指出了该领域中存在的问题。作者通过对现有技术的研究和分析,提出了解决方案,并在项目中使用三维建模等先进技术手段,对机器人平台的设计和实现进行了深入探索。
知识点8:项目背景与资金支持
项目以轮式机器人理论为出发点,参考了相关研究资料,并在江苏省高等学校大学生实践创新训练计划项目的资助下进行。该项目由顾鹏飞、于朋程等多位作者共同完成,涉及嵌入式研究、三维建模、软件设计技术等多个领域。
基于STM32微控制器的智能物流分拣机器人设计是集硬件选型、嵌入式编程、图像处理和机械控制于一体的复杂系统工程。通过深入解析该设计方案,我们可以了解到在实际应用中如何利用现代技术优化物流分拣流程,降低人工成本,提升工作效率。














- 1
- 2
- 3
前往页