在本篇基于MATLAB/Simulink的主动悬架仿真研究中,内容涉及多个重要的工程和计算机科学知识点,主要集中在车辆主动悬架系统的建模与仿真、控制策略设计、以及仿真实验的分析对比。
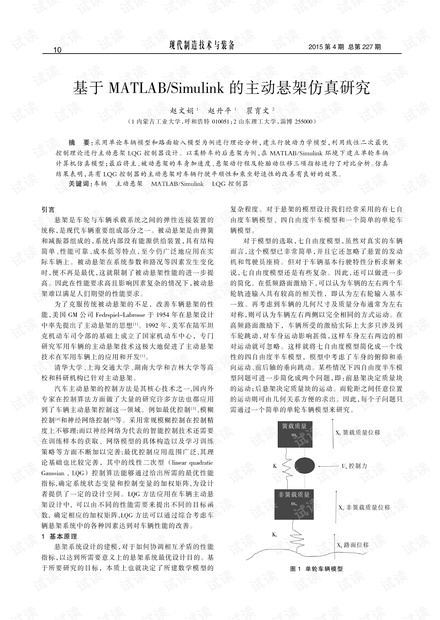
文档提到的单轮车辆模型是研究车辆动力学行为的基础,它通过模拟车辆与路面相互作用的简化模型,是分析车辆悬架系统性能的关键。在建模过程中,单轮车辆模型将车辆简化为一个车轮和附着在车轮上的质量,通常为了研究车辆的纵向动力学特性,忽略了空气阻力、车轮滚动阻力和加速阻力等因素。这样的简化允许研究者重点关注悬架系统的动态响应,而不受复杂因素的干扰。此外,单轮车辆模型便于数学描述和理论分析,而且对于理解更复杂的多轮车辆模型有重要意义。
接着,文档探讨了主动悬架系统设计的重要性。主动悬架与传统被动悬架的主要区别在于,主动悬架系统中加入了控制单元,允许系统主动响应路面激励和其他变化因素。这种设计可以显著提升车辆的行驶平顺性和乘坐舒适性。主动悬架的关键技术之一是控制策略的制定,本研究中采用的线性二次最优控制理论是一种经典的控制策略,它以线性系统理论为基础,考虑了系统的性能指标和控制成本,最终能够提供最优的控制策略,即线性二次高斯(LQG)控制。
文档中还提到了悬架系统模型的简化。在主动悬架设计中,为了减小计算负担,通常采用简化模型,如四自由度半车模型和七自由度车辆模型。这些模型关注车辆的俯仰、垂向运动、前后轴的垂向跳动等关键特性,能够比较全面地反映车辆在不同路面激励下的动态响应。通过模型简化,工程师能够针对具体的设计目标,设计出满足特定性能需求的悬架系统。
仿真技术是本研究的核心内容之一。通过MATLAB/Simulink这一强大的仿真平台,可以在计算机上模拟出主动悬架系统在不同路面条件下的工作情况。仿真过程中,能够使用滤波白噪声模型来模拟路面的随机激励,这对于评估悬架系统在真实世界复杂路面条件下的性能至关重要。滤波白噪声模型通常具有计算量小、速度快、模拟精度高的特点,使仿真过程更为高效。
文章的实验部分涉及主动悬架与被动悬架之间的性能对比分析。通过比较车身加速度、悬架动行程和轮胎动位移三项指标,本研究成功展示了具有LQG控制器的主动悬架在改善车辆行驶平顺性和乘坐舒适性方面的明显优势。这种对比分析对于理解主动悬架的性能提升效果具有直观的意义。
本篇文档还指出了现有主动悬架控制方法中存在的局限性和挑战。例如,最优控制虽然应用广泛,但对模型的依赖性强;而模糊控制和神经网络控制则存在控制精度和样本获取等问题。LQG方法作为研究对象,其通过综合考虑悬架系统中的多种因素,提供了系统性能改善的可能性,但研究者仍需面对在不同实际应用场景下的进一步调整和优化。
文档涉及的主要知识点包括车辆动力学模型的建立、主动悬架系统的设计与仿真、控制策略的应用与分析、仿真技术在车辆工程中的应用等。这些内容对于相关领域的研究人员、工程师及学生在理解现代车辆主动悬架技术方面具有重要的参考价值。