本篇论文专注于研究单神经元自适应PID控制器,并通过MATLAB软件进行仿真实验,旨在提供一种在工业控制应用中具有更好适应性和鲁棒性的控制方法。PID控制器作为工业控制领域中应用广泛的经典控制方法,因其算法简单、结构稳定而在工业过程中得到广泛应用。然而,在面对一些复杂的非线性问题和系统模型不确定的情况下,传统PID控制器的效果并不理想,所以有必要探索新的控制技术来改善控制性能。
单神经元自适应PID控制器的提出是为了解决传统PID控制器在复杂环境下的不足。这种控制器利用单神经元的自学习、自适应、自组织能力,通过调整自身的连接权值来改善控制性能。在控制器结构上,单神经元自适应PID控制器通过实时调整比例、积分和微分参数来适应控制对象的变化,实现对控制对象的精准控制。在控制算法上,采用有监督的Hebb学习规则,通过性能指标或递进信号对控制器的输出进行调整,以此保证控制器输出的准确性。
为了验证单神经元自适应PID控制器的优越性,本篇论文通过MATLAB仿真软件进行实例仿真,将单神经元自适应PID控制器与传统的PID控制器进行比较。仿真结果表明,单神经元自适应PID控制器能够更好地适应被控对象的特性,具有更好的控制品质,有效地提高了控制精度和稳定性,表明了其优于传统PID控制器的控制效果。
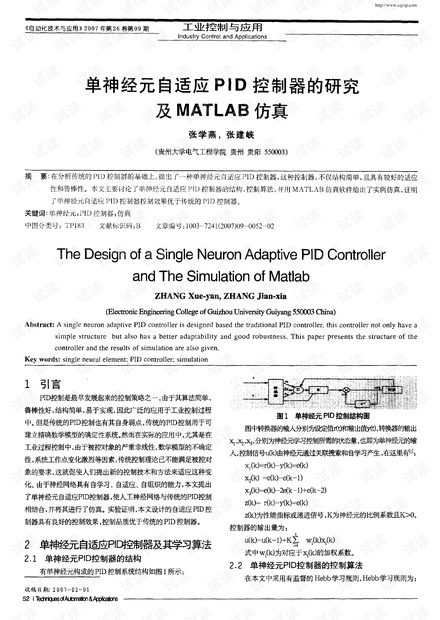
单神经元自适应PID控制器的结构简单,主要由单神经元和PID控制器两部分组成。神经元通过采集系统的误差信号并对其进行处理,然后通过关联搜索和自学习产生控制信号,这些控制信号经过神经元的加权求和后,得到控制器的输出量。控制算法中的Hebb学习规则可以调节神经元之间的连接权值,以适应环境的变化。
在单神经元自适应PID控制器的设计中,需要设置合适的神经元比例系数和学习效率,这些参数的选择对控制器的性能有着直接的影响。比例系数K是神经元输出信号的一个重要参数,它直接影响到控制器响应速度和系统的稳定性。学习效率n则与学习过程的快慢有关,它决定了神经元对环境变化的适应速度。
在实际应用中,单神经元自适应PID控制器不仅可以处理确定性系统,还能够适应复杂的工业过程中的非线性、不确定性等问题。由于神经网络具有一定的学习和记忆能力,因此单神经元自适应PID控制器可以更好地处理传统PID控制器无法应对的动态变化。
单神经元自适应PID控制器的研究和仿真为工业过程控制提供了新的控制策略,通过神经网络与传统PID控制的结合,增强了控制系统的自适应性和鲁棒性,展现了其在现代工业自动化控制中的应用前景。同时,MATLAB仿真软件在控制器设计和性能测试中发挥了重要作用,通过仿真验证了该控制器在控制品质上的优势,为控制器的进一步研究和实际应用打下了基础。














- 1
- 2
前往页