无刷直流电机(BLDCM)控制系统的Matlab仿真是一项涉及到电机控制理论和软件仿真技术的研究工作。通过Matlab的Simulink工具,可以构建无刷直流电机的仿真模型,并对其进行仿真测试和分析。研究者通常需要提出新的控制方法,并通过仿真来验证其有效性。在本文中,提出了基于反电势控制方法的无刷直流电机控制系统的Matlab仿真,具体知识点包括以下几个方面:
1. 无刷直流电机的反电势控制方法:反电势控制方法是通过检测电机反电动势来调整电机转速和位置的一种技术。由于无刷直流电机中定子的绕组在旋转时会切割磁力线,根据法拉第电磁感应定律,会产生反电动势,它与电机的转速成正比。反电势的检测可以用来推算电机的位置和转速,进而控制电机的运转状态。
2. 基于Matlab的Simulink仿真环境:Simulink是Matlab中用于多域动态系统和嵌入式系统的基于图形的仿真和模型设计环境,它可以用来搭建无刷直流电机控制系统模型,并进行仿真测试。利用Simulink提供的模块库,可以快速构建电机控制系统模型,并对其运行效果进行仿真。
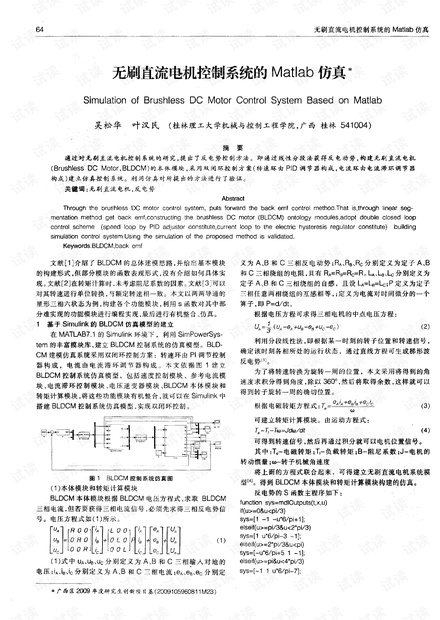
3. 无刷直流电机控制系统模型的建立:在Simulink环境下,构建了包含多个功能模块的BLDCM控制模型,其中包括速度控制模块、参考电流模块、电流滞环控制模块、电压逆变器模块、BLDCM本体模块和转矩计算模块。这些模块共同工作,实现对电机的双闭环控制。
4. 双闭环控制方案:BLDCM控制系统采用的是双闭环控制方案,其中转速环使用PI(比例-积分)调节器进行控制,电流环则采用电流滞环调节器进行控制。这种控制方案可以有效地对电机的转速和电流进行精确控制。
5. S函数的使用:在仿真模型中,某些复杂的控制算法或功能模块可能需要通过S函数(Simulink函数)进行编程实现。S函数允许仿真者用Matlab语言编写自定义的功能模块,这些模块可以被Simulink模型直接调用。
6. 反电势的线性分段法生成:在仿真模型中,为了模拟反电动势的变化,采用线性分段法根据电机的转子位置和转速信号来生成梯形波反电动势。这种方法可以较为准确地模拟实际电机运行中的反电势情况。
7. 电磁转矩的计算:电磁转矩的计算是BLDCM控制模型中的重要部分。在仿真模型中,根据电磁转矩方程式和运动方程式,可以通过仿真实时计算电机的转矩和转速,进而调整电机的运行状态。
8. 转速和位置信号的转换:为了将转速信号转换为旋转一周的位置信号,需要将得到的角速度进行积分,然后除以360度,并取得余数,这样可以得到转子旋转一周的确切位置。
上述知识点展示了无刷直流电机控制系统Matlab仿真的主要内容和实现步骤。在仿真过程中,研究者需要对电机控制理论有深入了解,同时熟练掌握Matlab和Simulink工具的使用。通过仿真实验,可以检验控制算法的可行性,优化控制参数,以实现电机的稳定、高效运行。