在探讨基于单片机的移动机器人设计时,我们首先需要了解单片机(Single-Chip Microcomputer)的基本概念,它是集成了CPU、RAM、ROM、I/O接口等多种功能模块于一体的微型计算机系统。在机器人设计中,单片机作为机器人的“大脑”,负责处理数据、执行程序并控制机器人的各种行为。而AT89S52单片机是ATMEL公司生产的8位单片机,广泛应用于单片机控制系统领域。
移动机器人的设计通常包括硬件设计和软件设计两个方面。硬件设计涉及到单片机模块、电源模块、传感器模块、电机驱动模块、LCD显示器模块等多个模块的选型和组装。软件设计则包括编写驱动程序、控制算法等,以实现机器人的各种功能。
在硬件设计方面,单片机模块是核心部分,它通过编程控制其他模块协同工作。电源模块为整个机器人提供稳定的电源。传感器模块负责收集外界信息,如红外传感器用于路径检测和速度监测。电机驱动模块根据单片机的指令驱动电机运转。LCD显示器模块用于显示机器人的状态信息。此外,避障模块和循线功能电路也是移动机器人设计中的重要组成部分,它们使机器人能够自主避障和沿预定路径移动。
软件设计方面,需要编写驱动程序来控制电机的运行,实现机器人前进、后退、转向等基本动作。控制速度模块则是为了调整机器人的运行速度,使其能够适应不同的环境。循线功能电路及程序则是为了实现机器人沿着特定路径移动,例如走直线或者按照特定的轨迹转弯。
整个移动机器人的组装设计过程,是从电路的连接开始的。机器人需要连接电源以运行,并且还需要连接到PC或者笔记本电脑上进行编程和交互。这通常通过串口电缆连接来完成。串口的连接可以让机器人教学板与电脑通信,若电脑具备串行接口,可以直接使用串口连接电缆;否则,需要通过USB接口来实现,这就需要安装对应的USB驱动程序。
在系统设计任务中,设计一个基于连续旋转伺服电机的智能移动机器人,意味着机器人能够接收特定的程序指令,通过控制电路和驱动模块使电机连续旋转,实现预定的移动动作。电机模块是机器人实现移动的关键,通过调整电机的转速和方向来控制机器人的移动状态。
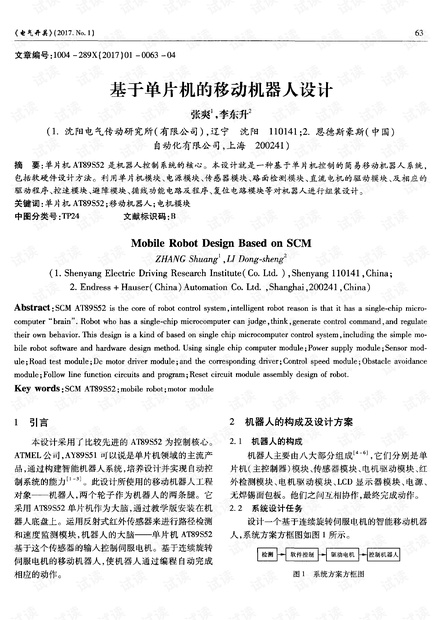
系统设计方案中会涉及到一个系统方案方框图,这是一种通常用于表示系统组件和它们之间交互关系的图示。方框图清晰地展示了从路径检测到软件控制,再到驱动电机,最后控制整个机器人的各个组成部分。
基于单片机的移动机器人设计是一个涉及到电子工程、计算机编程、控制系统等多学科知识的综合性工程。成功的机器人设计不仅需要对单片机及其编程有深入的理解,还需要熟悉各种传感器、驱动器等硬件组件的特性,并能够将它们有效地集成到一个协调工作的系统中去。设计过程中,可能还会涉及到电路设计、信号处理、算法实现、机械结构设计等多个方面的技能。通过这样的设计,可以培养设计并实现自动控制系统的综合能力。