一、无刷直流电机控制系统概述
无刷直流电机(Brushless DC Motor,简称BLDCM)因其良好的起动和调速性能、简单的控制方法以及较大的堵转转矩等特点,在多种领域驱动和伺服系统中得到广泛应用。常见的控制方式为二二导通单管调制,需要精确地检测转子磁场相对于定子绕组的位置,以便控制逆变电路的导通与关断。传统的转子位置信息检测方法多依赖于位置传感器,如霍尔传感器等。然而,这不仅增加电机体积和成本,也会因为接线增多而引入干扰,且在极端高低温环境下可能无法正常工作。
二、FPGA的无刷直流电机控制系统研究背景与意义
为了克服现有传感器控制方式的不足,研究者们开始探讨无位置传感器控制方式,即不使用位置传感器的情况下实现BLDCM的精确控制。本研究探讨以卷积神经网络(CNN)作为基础模型,并利用FPGA作为神经网络加速器的无刷直流电机控制系统的设计思路和优化策略,从而实现BLDCM的自适应控制。FPGA因其可重编程特性、高速并行处理能力和实时响应能力,被认为是实现该控制策略的理想平台。
三、FPGA加速目标和特点
FPGA加速目标主要是深度学习算法,尤其是卷积神经网络(CNN),它是以人工神经网络为框架,通过简单但非线性的模型对数据进行表征学习和特征提取。CNN的基本框架分为片外存储、片上缓存及寄存器三部分,其中片外存储负责存储大型数据集,片上缓存负责存储临时数据,寄存器则进行最快速的数据处理。CNN的训练过程包括数据处理和模型参数的反向调整,而推理过程则是使用已训练好的模型对数据进行处理与分类。
FPGA加速深度学习算法的主要特点在于其高度的并行性和可重配置性。并行性使得FPGA可以同时处理多个数据或任务,显著提高了数据处理的速度;可重配置性则意味着FPGA可以根据不同的深度学习模型或算法进行硬件级的优化。FPGA可以定制计算单元,以便在执行特定算法时最大限度地提高效率和速度,这对于需要高速数据处理的BLDCM控制系统而言具有重要意义。
四、FPGA在无刷直流电机控制系统中的应用
FPGA在BLDCM控制系统中扮演着至关重要的角色。FPGA可以通过其可编程的硬件逻辑实现复杂的控制算法,以支持无位置传感器的BLDCM控制。通过利用FPGA的并行处理能力,可以实时地对电机的转速、转矩、位置等参数进行准确测量和控制,保证电机在不同环境下的高性能运行。此外,FPGA的高速数据处理能力可以帮助实现快速的控制循环,提高系统的稳定性和响应速度。
五、FPGA开发流程
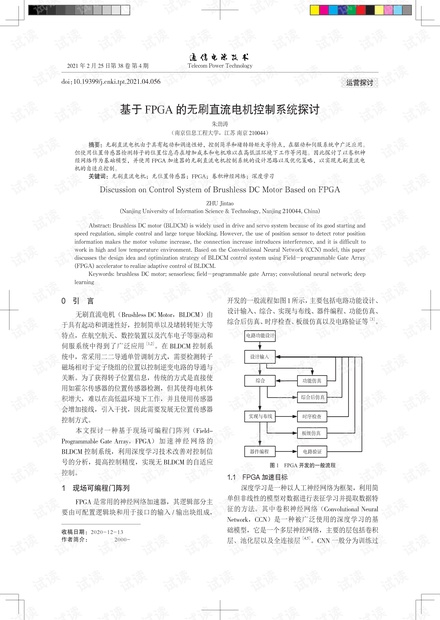
FPGA开发流程通常包括以下几个步骤:电路功能设计、设计输入、综合、实现与布线、器件编程、功能仿真、综合后仿真、时序检查、板级仿真以及电路验证。电路功能设计阶段需要明确系统的需求和功能规格。设计输入阶段是将电路功能转化为可由FPGA实现的设计描述,常用HDL(硬件描述语言)进行描述。综合阶段是将设计描述转化为逻辑元件和连接,实现设计逻辑。实现与布线阶段是将综合后的逻辑元件映射到FPGA的物理资源上,并完成信号的布线。器件编程阶段是将实现的逻辑配置到FPGA芯片上。仿真阶段包括功能仿真和综合后仿真,确保逻辑设计满足功能要求。时序检查是检查电路的时序是否满足系统运行的要求。板级仿真是在实际的硬件平台上进行测试,验证电路设计是否能在实际硬件上正常运行。电路验证则是确保最终的硬件产品能够满足预定的功能和性能要求。
六、CNN在无刷直流电机控制中的应用
CNN模型在无刷直流电机控制中具有重要应用。CNN通过卷积层、池化层和全连接层等结构,可以从原始数据中提取有效的特征信息,然后通过这些特征信息来进行控制决策。在BLDCM控制系统中,CNN可以用来预测电机的动态性能,从而实时调整控制策略以适应不同的工作条件,实现更精确和高效的电机控制。
七、总结
基于FPGA的无刷直流电机控制系统不仅能够有效解决位置传感器带来的成本增加和环境适应性问题,还能利用深度学习技术,特别是卷积神经网络,提高控制精度和效率。FPGA的高性能并行处理和可重配置性,使其成为实现复杂控制系统和优化算法的理想选择。随着FPGA技术的进一步发展,未来在无刷直流电机控制领域的应用前景将更加广阔。