本文档详细介绍了基于树莓派的智能家居扫地机器人系统设计的原理与实现方法。树莓派是一种基于Linux系统的信用卡大小的微型电脑,其在学习计算机编程教育的同时,也被用于控制智能家居设备。
智能家居的概念随着科技的发展和人们对高品质生活的追求而日渐普及。设计高效智能的家居设备是满足这一需求的关键。本文设计的系统,利用Linux系统的树莓派作为主控核心,以智能手机为客户端,基于ORB-SLAM技术进行空间定位与地图绘制,通过Socket通信模块实现了机器人与智能手机客户端的信息交互,实现了远程启动、重点清扫、自定义区域清扫等功能。
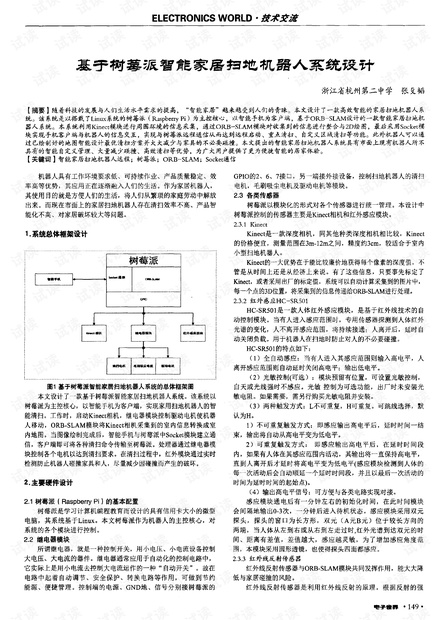
在系统总体框架中,系统首先启动Kinect相机,继电器模块控制驱动电机使机器人移动。ORB-SLAM模块将Kinect相机采集到的室内信息转换成室内地图。地图绘制完成后,智能手机通过Socket模块与树莓派建立通信,发送清扫命令。处理器通过继电器模块控制电机,进行清扫工作。在清扫过程中,红外模块实时检测环境,防止机器人碰撞家具和人。
系统硬件设计包括了树莓派的基本配置、继电器模块以及各类传感器。树莓派通过其GPIO接口控制继电器模块,驱动清扫电机等。Kinect相机作为深度相机,其价格便宜,测量精度较高,适合用于室内小型扫地机器人。HC-SR501红外感应模块则是用于防止机器人碰撞人体的安全保护设备。
此外,系统设计还考虑了环境信息的采集与处理,利用ORB-SLAM算法将采集到的环境信息整合并生成2D地图,以实现智能清扫。系统具备智能自定义管理、减少碰撞、高效清扫等优势。
总结以上内容,我们可以归纳出以下知识点:
1. 树莓派的定义:树莓派是一种具有信用卡大小的微型电脑,专为计算机编程教育设计,且搭载了基于Linux的操作系统。
2. 智能家居的含义:智能家居是指利用科技手段将家居设备进行联网控制,以提供更加便捷、舒适的生活环境。
3. 扫地机器人的工作原理:扫地机器人通过传感器采集环境数据,利用算法进行路径规划和空间定位,并执行清扫任务。
4. ORB-SLAM技术:ORB-SLAM是一种能够将机器人采集到的室内信息转换成室内地图,并进行空间定位的算法。
5. Socket通信模块:Socket通信模块使得机器人可以通过网络与智能手机客户端进行信息交互。
6. 红外感应模块的作用:红外感应模块用于实时检测周围环境,防止机器人在清扫过程中发生碰撞。
7. Kinect相机的特点:Kinect是一款价格相对低廉的深度相机,具有较好的测量范围和精度,适合用于室内小型扫地机器人。
8. 继电器模块的作用:继电器模块在电路中起到自动调节、安全保护和转换电路的作用,可以控制大电流设备。
通过以上知识点,我们可以看出,设计一款基于树莓派的智能家居扫地机器人系统涉及到硬件选择、软件编程、环境感知、路径规划等多个技术环节。这不仅需要对树莓派及其操作系统有深入的了解,还需要掌握相应的算法和通信技术,才能实现一个高效、智能的家居清扫机器人。














- 1
- 2
前往页