在深入探讨“基于PLC的船舶自动舵控制系统设计及其仿真”这一主题时,我们可以按照以下结构来详细展开知识点:
一、引言
引言部分强调了船舶自动舵系统的重要性,并指出了当前传统PID控制系统的局限性。船舶自动舵是保证船舶航行安全的关键设备,它必须具备良好的操纵性能,包括灵敏性和航向保持功能。同时,还需减少舵轮的转舵次数和幅度以适应船舶运行环境的复杂性,如船舶自身航速及载重等影响因素。
二、传统PID船舶自动舵控制系统
传统PID船舶自动舵控制系统是一个闭环控制系统,包括自动操舵、随动操舵和应急操舵三种模式。控制系统将设定的航向和舵轮舵角转化为模拟信号,经过放大、调节后控制电磁阀,从而启动液压系统完成相应的操纵任务。然而,这些系统存在抗高频干扰能力弱,模拟放大器性能不稳定等问题,导致长时间运行后电路特性可能不正常,无法适应实际环境条件和船舶的动态特性。
三、基于PLC的船舶自动舵控制系统设计
针对传统PID系统的不足,本文提出了基于可编程逻辑控制器(PLC)的自动舵控制系统设计。
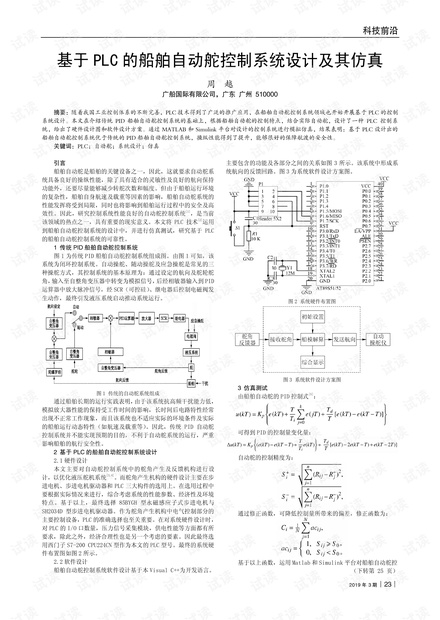
1. 硬件设计
硬件设计部分主要包括舵角产生机构的设计,该机构设计的关键在于选择合适的步进电机、步进电机驱动器和PLC。通过综合考虑系统性能参数、经济性和环境特点,选择了适合的型号。文中提到了85BYGH型步进电机与SH2034D型步进电机驱动器的结合,以及西门子S7-200CPU224CN型PLC的选用。硬件布置图(图2)展示了整个系统的物理配置。
2. 软件设计
软件设计以VisualC++为开发语言,开发语言的选择表明了系统软件的开发环境。软件设计方案图(图3)展示了软件结构以及各部分间的关系,重点在于形成系统航向的反馈回路。
3. 仿真测试
在仿真测试部分,通过Matlab和Simulink平台模拟所设计的控制系统,并给出了仿真测试结果。结果显示,基于PLC的自动舵控制系统性能优于传统的PID控制,具体体现在操作性能的提升和航行安全性的保障。
四、结论
结论指出基于PLC设计的船舶自动舵控制系统在操作性能上的优势,以及在保障航行安全方面的实际意义。
五、参考文献
该部分内容虽然不完整,但提到了与移动机器人、巡检机器人、变电站设备巡检机器人以及铁路信号机械室监控系统的相关文献,显示了该研究领域的宽泛性和相关技术的跨领域应用。
六、其他技术应用
虽然不是直接与“基于PLC的船舶自动舵控制系统设计及其仿真”主题相关的内容,但文章最后提到了高速铁路信号设备可靠性提高和智能巡检机器人在信号设备巡检中的应用,展示了类似技术在不同行业中的应用潜力。
通过以上各部分知识点的介绍,可以全面理解基于PLC的船舶自动舵控制系统设计及其仿真的研究背景、目的、实现过程、优势和潜在应用。此外,文章还指出了硬件设计和软件设计的要点,以及仿真测试的重要性和结论,为相关领域的研究人员和技术人员提供了参考。