智能巡检机器人设计的知识点主要包括以下几个方面:
1. 智能巡检机器人的设计背景与需求:智能巡检机器人是针对室外复杂环境下的巡检需求设计的,旨在替代人类完成危险或繁重的巡检工作,如仓库、校园等场所的巡检。随着技术的发展,越来越多的领域要求机器人能够自主规划路线和避障。
2. 机器人本体结构与控制系统:智能巡检机器人采用双履带式设计,以适应各种复杂路况。控制核心采用STM32单片机,能够根据GPS定位模块定位的位置信息进行路径规划。控制系统还包括多种传感器,例如超声波传感器用于障碍物检测。此外,控制系统还包括运动控制器、驱动电机等部分,实现对机器人的精确控制。
3. GPS定位与模糊控制算法:智能巡检机器人通过GPS定位模块获取位置信息,并通过模糊控制算法规划行走路径。模糊控制策略能够实现在导航过程中的局部避障功能,提高巡检效率。
4. STM32微处理器与多传感器融合:STM32微处理器作为机器人的处理核心,负责接收GPS模块的位置信息,并通过算法确定行走方式。多传感器融合则指机器人通过集成的各类传感器收集环境数据,实现对周围环境的感知。
5. 电机驱动与隔离驱动技术:智能巡检机器人配置了两个凯恩驱动电机,实现双驱动模式,提高了机器人的适应性和稳定性。电机与STM32单片机之间采用隔离驱动技术,例如使用ULN2003AFWG达林顿晶体管阵列驱动,避免电机高工作电流对单片机的损害。
6. 无线通信模块与组网能力:设计选用了GT-38无线串口通信模块,该模块具有多频道设置,通信距离可达2000m。通过无线通信模块实现上位机与下位机的通信,提高系统运作的稳定性与安全性。此外,GT-38模块使得巡检机器人能够组网,实现一台上位机操控多台机器人,有效解决了监控死角的问题。
7. 北斗导航系统与双模定位模块:导航定位部分采用中国自主研制的北斗导航系统和UM-220-NBDS/GPS双模定位模块。该模块功能强大,两个串口输出内容相同,方便与STM32单片机通信,确保机器人能够在复杂环境下精确定位。
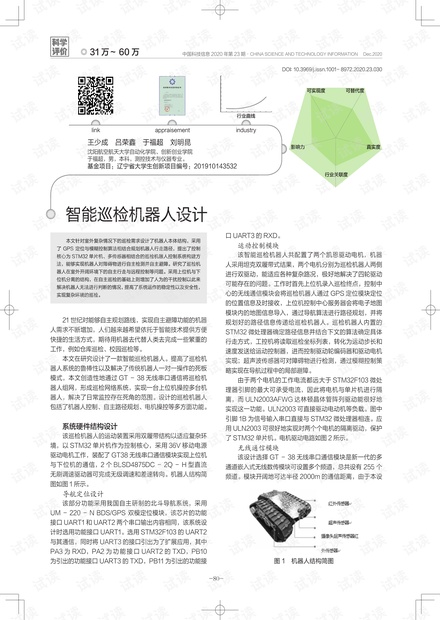
8. 硬件结构设计与扩展应用:智能巡检机器人的硬件结构设计包括双履带结构的运动装置,36V移动电源驱动,以及GT38无线串口通信模块。通过邮票孔封装方式,方便客户将模块嵌入应用系统内。
9. 模糊控制策略与障碍物检测:机器人通过障碍物检测,结合模糊控制策略,实现了复杂环境下的局部路径规划和自主避障。模糊控制策略通过二进制编码,针对不同情况下的机器人执行指令,提高巡检效率和安全性。
智能巡检机器人的设计是一个集成了机器人技术、导航定位、无线通信和控制算法的复杂系统工程。从本体结构到控制系统,再到导航定位和无线通信模块,每部分都需要精确设计和测试,以确保机器人能够在各种环境下有效完成巡检任务。随着技术的进步,智能巡检机器人的功能和性能将不断提升,应用范围也将进一步扩大。

 Hello_Yangyi2022-05-15用户下载后在一定时间内未进行评价,系统默认好评。
Hello_Yangyi2022-05-15用户下载后在一定时间内未进行评价,系统默认好评。
















