在探讨基于模糊神经网络的煤矿救援机器人路径规划研究时,我们涉及到的关键知识点有:模糊神经网络、BP反向传播学习算法、机器人路径规划、传感器技术、环境建模、机器人移动机构设计等。
模糊神经网络(Fuzzy Neural Network, FNN)是一种结合了模糊逻辑理论和神经网络技术的智能系统。它能够处理不确定性和模糊性信息,并通过训练学习模式来优化决策过程。在煤矿救援机器人路径规划的应用中,FNN能够模拟人的决策过程,处理复杂和模糊的环境信息,以实现有效的路径选择。
BP反向传播学习算法是一种多层前馈神经网络的训练算法,它通过误差反向传播的方式来调整网络权重,以最小化输出误差。在该研究中,BP算法用于训练模糊神经网络,能够提高网络在线精度和学习速度,使救援机器人在复杂环境中的路径规划更加精确和高效。
机器人路径规划是指机器人根据自身状态和环境信息,计算出从起点到终点的一条无碰撞且符合某些性能指标的路径。在煤矿救援场景中,路径规划尤为关键,因为救援机器人需要在灾后复杂的非结构化环境中有效避开静态和动态障碍物,快速安全地到达目标点。
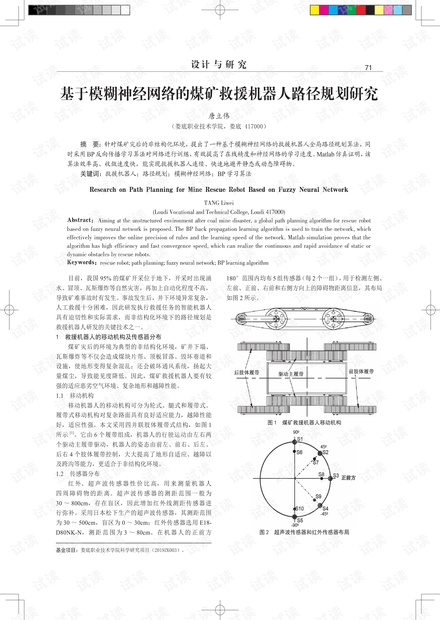
传感器技术在路径规划中扮演了重要角色。文中提到的超声波传感器和红外传感器能够检测机器人周围的障碍物距离信息,通过互补的方式弥补了单一传感器的盲区,提高了环境感知的准确度和范围。传感器的布局设计对机器人的环境感知能力具有决定性影响。
环境建模是指根据收集到的环境信息,建立一个能够反映实际环境的地图模型。在此研究中,是通过确定机器人运动区域范围并构建XOY全局坐标系来进行的。坐标系中考虑了起点和目标点的位置,以及机器人与目标点连线和X轴的夹角等参数,为路径规划提供了基础数据。
移动机构设计是实现机器人在特定环境下的移动能力的关键。文章中描述的四并联肢体履带式结构,具有良好的适应复杂路面和越障性能,适合非结构化环境。通过左右驱动主履带和四个肢体履带的协同控制,机器人的地形适应能力得到了显著提高,这对于在煤矿井下复杂环境中移动至关重要。
文中还提到了对于机器人路径规划和移动机构设计的基金支持,这体现了相关研究在推动实际应用中的重要性和价值。
文章通过对模糊神经网络、BP学习算法、传感器技术、环境建模和移动机构设计的综合应用,提出了一种适用于煤矿救援场景的机器人路径规划方法,为煤矿救援机器人的研发和实际应用提供了理论和技术支持。