数控机床上下料机器人引导应用系统是在现代工业生产中应用机器人技术的典型场景之一。随着机器人技术的不断发展,机器人在工业自动化中的角色日益重要。该系统的应用能提高生产效率、增强作业精度,降低生产成本,同时减少人工操作带来的安全风险。
机器人引导下的数控机床上下料应用系统研究的核心内容包括以下几个方面:
1. 机器人信号技术的应用:机器人引导系统主要通过信号技术来实现控制逻辑,即通过信号连接应用系统、数控机床各部位以及机器人手臂。信号技术主要通过I/O接口连接,用于发送指令并控制机器人的动作。此外,传感器的安装与应用可以实时监控机器人手臂和数控机床各部件的状态,并将状态信息反馈给系统,保证整个作业流程的稳定与可靠性。
2. 机器人与数控机床的协同工作:在上下料过程中,机器人不仅仅是执行单一任务,而是与数控机床协同工作。通过应用系统,机器人可以控制料的运输和放置,同时数控机床根据信号进行加工。这一流程在实现自动化的同时,需要与人工操作的流程高度匹配,保证生产效率和精度。
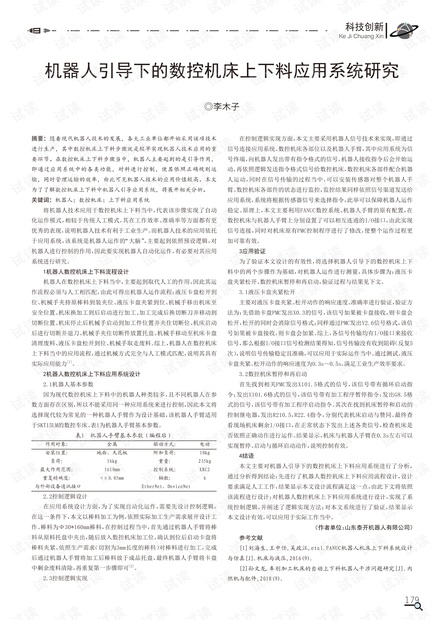
3. 机器人引导系统的设计与实施:设计机器人引导系统需考虑数控机床与机器人手臂的兼容性,选择合适的机器人型号作为基础。在本文中,设计者选择了适用于SKT15LM数控车床的机器人手臂。系统设计中需要考虑机器人的基本参数,如最大负荷、最大作用范围、驱动方式、重量及控制系统和轴数等,这些参数直接影响机器人在实际生产过程中的性能。
4. 控制逻辑的设计与验证:控制逻辑的设计包括对机器人和数控机床的控制指令的定义和传输方式,以及对机器人动作的精确控制。本文中提到了通过PMC(可编程机器控制器)发出的信号进行机床的控制,包括夹紧松开、暂停和再启动等动作。这些信号的定义和传输需确保稳定、准确,并通过实际操作来验证系统的有效性。
5. 应用验证系统的实施:通过实际测量机器人在特定作业步骤中的响应速度和准确率来验证系统的有效性。例如,验证液压卡盘的夹紧和松开动作是否能在规定时间内准确完成,数控机床的暂停和再启动是否准确。这些验证有助于了解机器人的实际工作能力,确保机器人引导系统在实际生产中的可靠性和稳定性。
通过这些研究和分析,我们得到的结论是机器人技术在数控机床上下料的应用不仅能取代人工操作,还能实现生产流程的自动化,提高工作效率和加工精度,降低生产成本和安全风险。研究还表明,采用合适的机器人手臂型号和设计合适的控制逻辑是实现机器人引导上下料系统的关键。随着技术的不断进步,未来这种系统将会更加智能化、集成化,对于推动工业生产向智能制造方向发展具有重要的意义。