根据提供的文件信息,我们可以得出以下知识点:
1. 并联机器人简介:并联机器人是一种利用多个运动链路,从多个方向支撑动平台的机械系统。这种机器人的特点是刚度大、精度高、承载能力强。在该文档中提到的3-PSS并联机器人,其中“P”代表的是移动副,而“S”代表球铰,表明该机器人有三个运动链路,每个链路都包含一个移动副和两个球铰。
2. 矩阵理论在机器人动力学建模中的应用:矩阵理论是一种强大的数学工具,可以用于描述机器人各个部件之间的位置、速度和加速度关系,进而用于动力学建模。文档中提到利用矩阵理论和Kane方程进行逆动力学方程的推导。
3. Kane方程:Kane方程是一种用于多体系统动力学分析的方法,由物理力学家T.R. Kane提出。它通常用于简化复杂系统动力学方程的推导过程,对于并联机器人而言,使用Kane方程可以有效地建立系统的动力学模型。
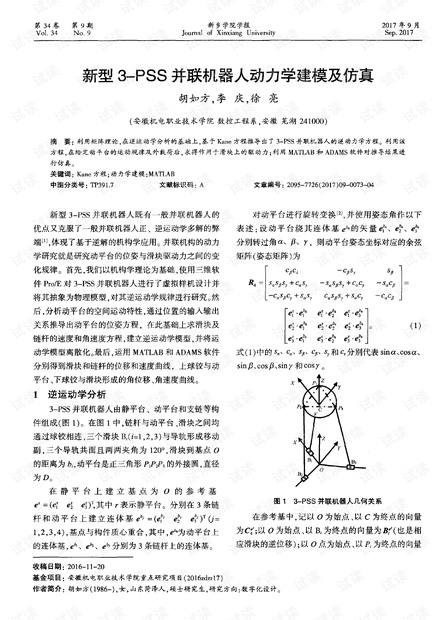
4. 逆运动学分析:逆运动学是研究机器人末端执行器的位姿与关节变量之间的关系。文档中描述了通过逆运动学分析推导出3-PSS并联机器人的运动规律和相应的速度、角速度方程。
5. MATLAB和ADAMS仿真软件应用:MATLAB是一个广泛应用于数学计算、工程设计、数据分析等领域的软件平台。ADAMS则是专业机械系统动力学分析软件。文档中提到了使用这两种软件进行动力学模型的仿真,以验证动力学方程的正确性,并得到滑块和链杆的位移速度曲线等动力学特性曲线。
6. 动力学建模:动力学建模是指对系统的质量、惯性、受力情况进行数学描述的过程,目的是预测系统的动态响应。文档中详细介绍了如何建立3-PSS并联机器人的动力学模型,并将其离散化处理。
7. 三维软件Pro/E应用:Pro/E是美国PTC公司开发的三维CAD设计软件。文档中提到了使用Pro/E对3-PSS并联机器人进行虚拟样机设计,并将其抽象为物理模型,这是进行动力学研究前的必要步骤。
8. 空间运动特性分析:对于并联机器人而言,了解其动平台的空间运动特性至关重要。文档描述了如何通过位置的输入输出关系推导出动平台的位姿方程,以及如何求解滑块及链杆的速度和角速度方程。
通过上述知识点,我们可以更深入地了解3-PSS并联机器人的动力学建模过程,以及所使用的关键理论和软件工具。这些知识对于机器人设计、仿真分析和动力学研究具有重要的指导意义。