从PID技术到“自抗扰控制”技术1
需积分: 0 132 浏览量
更新于2022-08-03
收藏 226KB PDF 举报
【PID技术】PID(比例-积分-微分)控制技术是一种广泛应用的自动控制技术,它通过结合比例(P)、积分(I)和微分(D)三个控制元素,以实现对系统误差的精确控制。PID控制器的基本原理是将系统的误差信息(即期望值与实际值的差值)作为输入,然后输出一个综合信号来调整系统的操作,以减少或消除误差。比例项直接影响控制器的响应速度,积分项用于消除稳态误差,微分项则有助于提前预测并抑制系统的振荡。
【自抗扰控制技术】自抗扰控制(ADRC,Active Disturbance Rejection Control)是相对于PID控制的一种新型控制策略。它不再依赖于精确的系统模型,而是通过引入扩张状态观测器(ESO)来实时估计和补偿系统的不确定性及外部扰动。自抗扰控制器包括跟踪微分器(TD)来提取微分信号,非线性PID(NPID)来改善控制性能,以及ESO来估算和抵消系统中的扰动。这种方法的优点在于能够简化控制算法,便于参数调整,并能应对复杂和非线性的动态系统。
【传统PID的优缺点】PID控制的优点在于结构简单,容易理解和实现,广泛适用于各种控制系统。然而,PID控制在处理非线性、时变或者存在大量不确定因素的系统时,可能会出现响应慢、超调大、稳态误差无法消除等问题。传统的PID控制器依赖于对系统模型的精确知识,而这在实际工程中往往难以获取。
【自抗扰控制的优势】自抗扰控制技术克服了PID的一些缺点,通过非线性机制设计的控制器可以不需要精确的系统模型,同时能够有效地估计和抑制扰动,提高了系统的鲁棒性和适应性。跟踪微分器能更好地提取微分信号,避免噪声放大问题,而扩张状态观测器则可以实时估算系统状态和扰动,增强了系统的控制精度。
【总结】从PID技术到自抗扰控制技术的转变,体现了控制理论的发展方向,即从依赖精确模型转向更注重实际系统性能和鲁棒性的提升。自抗扰控制通过引入非线性控制元素,能够处理更为复杂的控制问题,对于工业过程控制中的不确定性和扰动有更强的适应能力,为实际应用提供了更加灵活和高效的解决方案。

收稿日期:
!""!#"$#"%
作者简介:韩京清(
&’()#
),男(朝鲜族),吉林长白人,研究员,大学本科,主要从事控制理论与应用等方面的教学与科研工作。
控 制 工 程
*+,-.+/0,
1
2,33.2,
1
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
+4*52,6
76
8
!""!
9+/:’
,
;+:(
!""!
年
<
月
第
’
卷第
(
期
文章编号:
&""<=(>>!
(
!""!
)
"(=""&(=">
从
!"#
技术到“自抗扰控制”技术
韩 京 清
(中国科学院 数学与系统科学研究院 系统科学所,北京
&"""%"
)
摘 要:从传统
?@A
的原理出发,分析了它的优缺点。利用非线性机制来开发了一些具有特殊功能的环
节:跟踪微分器(
BA
),扩张状态观测器(
0CD
),非线性
?@A
(
;?@A
)等,并以此组合出高品质的新型控制器
#
自抗
扰控制器(
EAF*
),从而形成了新的“自抗扰控制”技术。新型的控制器具有算法简单、参数易于调节的特点。
关 键 词:
?@A
;非线性反馈;自抗扰控制
中图分类号:
B?&(
文献标识码:
E
$
引 言
?@A
控制器在工业过程控制中占据的主导地
位是绝无仅有的。目前,
?@A
控制器在运动控制、
航天控制及其他过程控制的应用中,仍然占据
’<
G
以上。据最新的文献[
&
]显示,在纸浆和造纸工
业中,
?@
控制器的应用甚至超过了
’%G
。由此
可见,不管现代控制理论给出的控制方法在理论
上是多么的完美而漂亮,可是仍然难以在现代的
工业控制中找到自己的立足之处。这说明时至今
日,控制理论和工程实际相脱离的鸿沟不但没有
弥合的迹象,反而有了加剧的趋势。
面对这种尴尬的局面,我们不得不重新认识
?@A
控制技术,探索其机理,发扬其优势,克服其
缺点,进而寻找更好的控制技术。本文的出发点
就在于此。
%
传统
!"#
的结构及优、缺点
传统
?@A
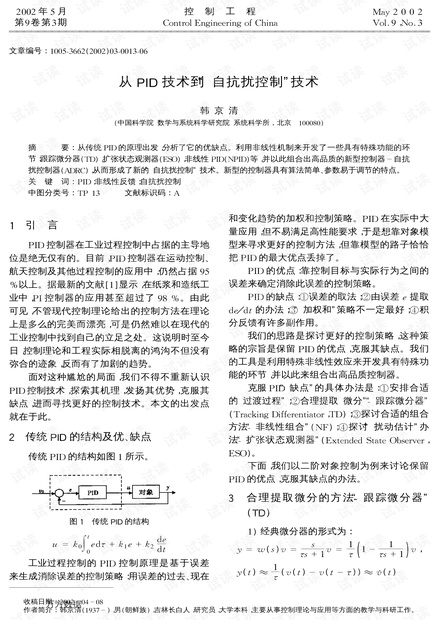
的结构如图
&
所示。
图
$
传统
!"#
的结构
!
"
#
"
"
$
"
%
H
!
&
#
&
%
&
#
!
H
%
H
$
工业过程控制的
?@A
控制原理是基于误差
来生成消除误差的控制策略:用误差的过去、现在
和变化趋势的加权和控制策略。
?@A
在实际中大
量应用,但不易满足高性能要求,于是想靠对象模
型来寻求更好的控制方法,但靠模型的路子恰恰
把
?@A
的最大优点丢掉了。
?@A
的优点:靠控制目标与实际行为之间的
误差来确定消除此误差的控制策略。
?@A
的缺点:
!
误差的取法;
"
由误差
%
提取
H
%
/
H
$
的办法;
#
“加权和”策略不一定最好;
$
积
分反馈有许多副作用。
我们的思路是探讨更好的控制策略,这种策
略的宗旨是保留
?@A
的优点,克服其缺点。我们
的工具是利用特殊非线性效应来开发具有特殊功
能的环节,并以此来组合出高品质控制器。
克服
?@A
“缺点”的具体办法是:
!
安排合适
的“过渡过程”;
"
合理提取“微分”
=
“跟踪微分器”
(
B.6IJ2,
1
A2443.3,-26-+.
,
BA
);
#
探讨合适的组合
方法
=
“非线性组合”(
;K
);
$
探讨“扰动估计”办
法
=
“扩张状态观测器”(
0L-3,H3HC-6-3DMN3.O3.
,
0CD
)。
下面,我们以二阶对象控制为例来讨论保留
?@A
的优点,克服其缺点的办法。
&
合理提取微分的方法
’
“跟踪微分器”
(
(#
)
&
)经典微分器的形式为:
’
"
(
(
)
)
*
"
)
!)
&
&
*
"
&
!
&
+
&
!)
&
( )
&
*
,
’
(
$
)
#
&
!
(
*
(
$
)
+
*
(
$
+
!
))
#
,*
(
$
)
万方数据
下载后可阅读完整内容,剩余5页未读,立即下载
146 浏览量
121 浏览量
2017-11-08 上传
2022-09-24 上传
143 浏览量
184 浏览量
182 浏览量
2025-01-23 上传
161 浏览量
123 浏览量
103 浏览量
152 浏览量
2019-08-01 上传
资源评论


以墨健康道
- 粉丝: 34
- 资源: 307









最新资源
- 基于VS2010的OPC客户端DA客户端源码(C#开发)二次开发,稳定可靠,详细注释及测试视频,opcclient源码OPC客户端 DA客户端源码(c#开发) C#开发,源码,可二次开发 本项目为V
- DeepSeek R1:AI推理引擎的技术创新与开源生态
- 自动驾驶Prescan与Simulink联合仿真下的LDW模型车道偏离预警系统研究,自动驾驶Prescan 和simulink 联合仿真LDW模型,车道偏离预警 ,核心关键词:自动驾驶; Presca
- 图像处理之图像边缘检测算法Demo
- 隐极永磁同步电机模型电流预测控制(MPCC)详解:开关频率控制、两步法与基础控制方法全解析,基于隐极永磁同步电机(共三个模型)-模型电流预测控制(MPCC)包含初始化脚本,可修改电机参数 分别采用开
- 全球产业趋势跟踪:DeepSeek推出开源第二代MoE模型PDF·
- FactoryIO升降台场景仿真实验:PLC编程入门教程,使用博图V16实现货物优先级出库功能,FactoryIO 升降台场景 仿真实验程序 使用西门子1500PLC博图V16,使用梯形图和简单的SC
- MATLAB代码:储能联合调峰调频优化模型-考虑电池退化成本、充放电约束与用户负荷不确定性,MATLAB代码:储能参与调峰调频联合优化模型 关键词:储能 调频 调峰 充放电优化 联合运行 仿真平
- 工业自动化通信开发库大全:涵盖串口通信、TCP/UDP、CAN总线等,PLC通信与数据库操作一体化,优化消息队列管理,全方位满足工业自动化软件需求,c#工业自动化通信开发库,工业自动软件必备的基本程序
- SSM甜品交易系统:基于JavaSSM框架与Eclipse开发环境,JSP前端开发的高效电商系统解决方案,ssm甜品交易系统,包含文档,Javassm Ecplice,jsp ,核心关键词:SSM甜品
- 本地大语言模型部署框架Ollama的详细介绍与应用
- React博客系统源码:极简设计自适应手机,部署演示视频,Markdown编辑器,自定义功能齐全,新鲜出炉的React博客系统源码,极简主义设计,手机端可自适应,超级简单,带部署文档与演示视频加截图
- QT C++ 集成百度智能云OCR文字识别示例源码:涵盖多种场景,API密钥即用,编译流畅,教程详细,QT C++ 百度智能云 OCR文字识别综合示例,源码 示例1.0集成多个使用场景,标准OCR、高
- 基于51单片机的PID算法控制电机转速与显示,按键设定与检测脉冲调节功能,程序代码与仿真方案探索,基于51单片机的pid算法控制电机转速 可以通过按键设置电机转速,结合定时器跟用外部中断检测脉冲,得出
- 基于LabVIEW的CAN上位机系统:实时解析DBC报文、分类显示接收报文并支持周期发送,附源码交付 ,基于labview的CAN上位机:可通过DBC实时解析报文、接收报文分类显示、报文周期发送等功能
- Cano-OSEK网络管理自动化测试脚本CAPL:涵盖多种测试用例,包括启动、配置、帧类型选择、自动修改配置、运行测试及报告生成等功能,适用于主流osek nm,涵盖Can通信电压读取、设备诊断等自动
