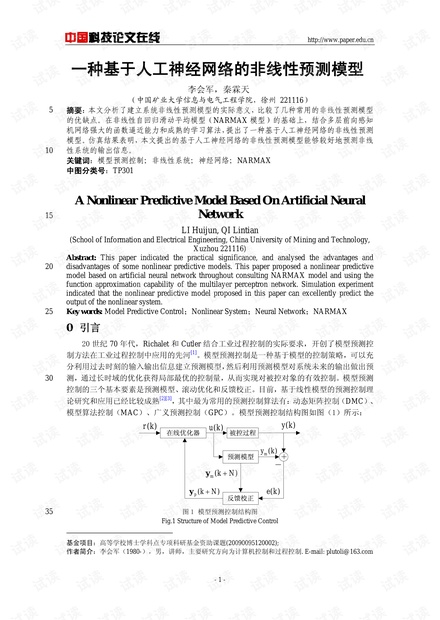
在研究工业过程控制时,模型预测控制(Model Predictive Control, MPC)是一种重要的控制策略,其核心在于建立预测模型并利用该模型进行未来的输出预测,以实现对被控对象的有效控制。模型预测控制由三个基本要素构成:预测模型、滚动优化和反馈校正。预测模型用于描述系统的行为,滚动优化负责预测未来一段时间内的输出,从而确定最佳控制动作,反馈校正则用来修正模型的预测误差,确保控制的精确性。
传统的模型预测控制大多基于线性模型,使用的预测控制算法有动态矩阵控制(Dynamic Matrix Control, DMC)、模型算法控制(Model Algorithm Control, MAC)和广义预测控制(Generalized Predictive Control, GPC)。这些线性预测控制算法在工业过程控制中应用广泛,尤其适用于控制目标要求被控对象在某设定值附近稳定运行的场景。然而,对于包含强非线性、扰动频繁或具有时变特性的控制系统,线性化的预测模型无法准确地描述系统的动态特性,可能导致控制不稳定。
人工神经网络(Artificial Neural Network, ANN)因其出色的非线性函数逼近能力和强大的学习算法,逐渐被应用于建立非线性预测模型。特别是在非线性自回归滑动平均模型(Nonlinear AutoRegressive Moving Average with eXogenous inputs, NARMAX)的基础上,结合多层前向感知机网络(Multi-Layer Perceptron Network, MLP),提出了一种新的基于人工神经网络的非线性预测模型。这种模型能够更好地捕捉和描述强非线性系统的动态行为,提高预测的准确性。
通过仿真实验可以看出,基于人工神经网络的非线性预测模型相较于传统线性模型在非线性系统输出信息预测方面表现出更加优越的性能。该模型利用了神经网络的学习能力,对历史数据进行训练,从而能够逼近系统的复杂非线性特性,实现更为精确的预测。
目前,对于包含强非线性的控制系统,模型预测控制的应用仍是一个挑战,尚未广泛应用于这类系统中。然而,随着人工神经网络等智能算法的发展和完善,利用这些算法建立的非线性预测模型有望为模型预测控制在复杂系统的应用开辟新的路径。
文章中提及的关键词“模型预测控制”,“非线性系统”,“神经网络”,“NARMAX”,都是当前控制理论和人工智能交叉领域研究的热点。模型预测控制与人工神经网络的结合,特别是对于非线性预测模型的探讨,对进一步推动控制工程领域的发展具有重要的理论和实际意义。
此外,文章还指出,随着科技的进步,模型预测控制的研究与应用已经取得了显著的进展,但仍然需要更多的研究来完善和提高非线性模型预测控制的性能,使其能够更好地适应实际工程需求。模型预测控制的未来发展,将不仅局限于线性模型,非线性模型预测控制将成为控制策略研究和开发的新焦点。
该论文所研究的基于人工神经网络的非线性预测模型,为非线性系统预测提供了一种新的思路和方法,这不仅拓展了模型预测控制的应用范围,也为智能控制理论提供了新的研究方向。对于控制工程师和研究人员而言,深入理解和掌握非线性预测模型,尤其是人工神经网络在其中的应用,将是提升系统控制性能和推动自动化技术发展的关键。