
帅气
自适应控制高手养成记
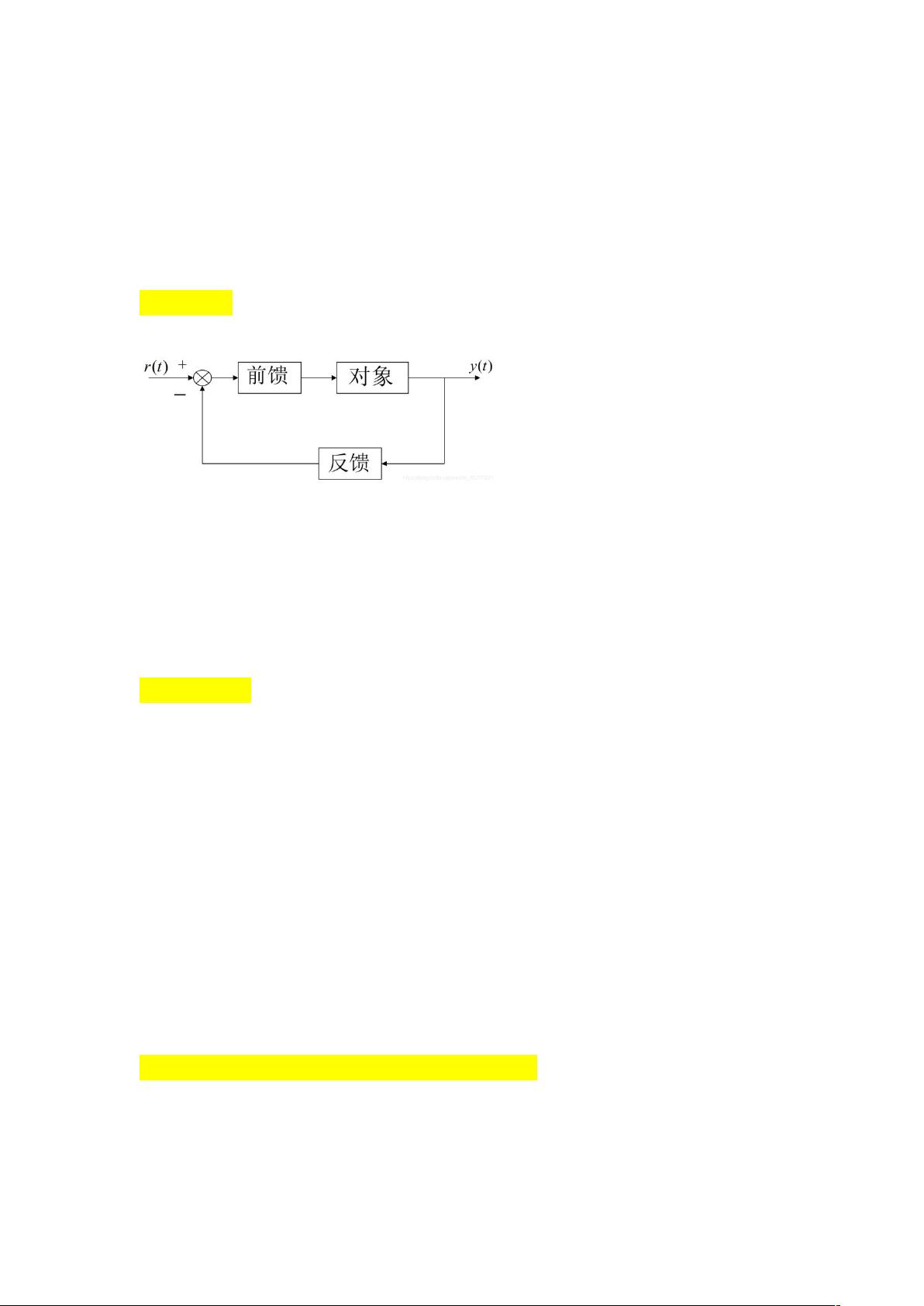
1. 基本概念
实质上,自适应控制是在线递推参数辩识算法与通常的控制方法的
结合。
确定系统:-数学模型完全确定的系统为确定系统。
所谓完全确定是指数学模型的阶次和参数是已知的。
确定系统在给定性能指标的前提下,-用三种方法进行系统设计
1.根轨迹法
2.频率特性法
3.状态空间法
根轨迹法和频率特性法是建立在传递函数的基础上。
状态空间法是建立在状态空间方程的基础上。
不确定系统:-数学模型不完全确定的系统称为不确定系统。-系统的模型误差包
含结构误差和参数误差俩部分。其中结构误差是指建立的模型与真实的系统特
性在函数形式或者阶次不同。比如为简化模型,通常会忽略高频特性,这使得
在低频特性运行时,对系统影响小,但当系统工作在高频范围时,未建模的部
分会被激化,使得模型与实际系统差异很大,产生显著模性结构误差。参数误
差主要来源于俩个方面:一是测量误差或者无法测量,二是在系统运行过程中
参数发生变化。通常建立的模型只是系统动态特性的一种近似,他描述了系统
在工作范围内的主要特性,而忽略了一些次要因素,对于这部分特性,我们称
之为不确定动态特性。当存在不确定性时,则无法通过反馈线性化直接补偿-,
需要用其他控制方法。
内部不确定:-结构或参数不能确切知道,-如散热系统,-化学反应速度。
外部不确定:-工序改变,-环境改变,-静摩擦,-随机干扰。
自适应控制的研究对象是具有不确定性的系统。自适应控制能修正自己的特性
以适应对象和扰动的动态特性的变化(比如控制参数可以依据期望信号的变化
而变化,也可以依据过程中的控制效果以及输入输出的响应自动调节,使得控
制性能最佳)。面对的这些客观的各式各样的不确定性,-如何综合出适当的控


剩余15页未读,继续阅读

向控制大师迈进
- 粉丝: 161
- 资源: 6









最新资源
- 【年度调薪】年度薪酬预算执行情况报告.xls
- 【年度调薪】调薪考核表.xls
- 【年度调薪】调薪矩阵表(HR总监绝密).xls
- 【年度调薪】度员工调薪登记表.xlsx
- 【年度调薪】薪资等级结构表.xls
- 【年度调薪】调薪调岗流程表格.xls
- 【年度调薪】部门年度薪资调整套级审批表.xlsx
- 【年度调薪】调薪流程.xlsx
- 【年度调薪】年度员工调薪登记表.xlsx
- 【年度调薪】员工调薪评估.xlsx
- 【年度调薪】员工加薪明细表.xlsx
- 【年度调薪】员工调薪记录表.xlsx
- 【年度调薪】HR疑难操作之调岗调薪(实务篇).doc
- 【年度调薪】工资评定调薪方案.doc
- 【年度调薪】年度调薪方案.doc
- 【年度调薪】调岗调薪操作技巧.doc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0