

0 引言
近二十年来,马尔可夫跳变系统(MJS)引起了学者们的广泛关注
[1-3]
. MJS 在不同模态之间可以切
换,并且它在不同模态之间的切换能反映生产中的故障、外部环境干扰的随机变化性,因此 MJS 在通信
系统、医学等多个领域有广泛的实际应用
[4-7]
.
最近数十年,网络控制系统(NCSs)引起了控制界的关注
[8-10]
. NCSs 的优点在于易于维护和使用,但
是需要考虑的是如何去减少网络时延、数据丢包、有限带宽带来的影响.在过去,许多科学家研究的是周
期触发方式(时间触发方式)的控制系统.在这个系统中,传感器以恒定的速率采集数据,把采集的数据逐一
地传输到控制器中,然而网络带宽是有限的,当数据采集量非常庞大时,会引起网络时延等问题,这会降
低控制系统的性能并且会出现不稳定现象.因此,如何降低网络带宽的利用率并且保证 NCSs 稳定和其它
控制性能不受影响成了学者们的研究热点.
在此情况下,学者们提出了事件触发机制.相较于周期触发方式,事件触发机制中传感器采集的数据
只有在满足预定义的条件下才会被传输到控制器中,因此可以减少网络资源的利用.文[11-12]研究了
NCSs 在连续系统中的事件触发控制器问题,提出了网络控制系统和事件触发方式协同设计算法.文[13]提
出了 NCSs 在连续系统中的事件触发机制的滤波器算法.在离散系统方面,学者们也逐渐提出了事件触发
机制的方案
[14-15]
.文[15]研究了离散系统的事件触发机制的保性能控制,利用时滞处理方法,将原来的事件
触发系统构建成一个新的离散时延系统,利用自由加权矩阵法处理交叉项,推导出了渐近稳定判据,并且
设计了保性能控制器,但是此文中用的是自由加权矩阵法处理交叉项,计算量十分大,保守性较大.文[14]
设计了离散系统的事件触发控制器,构造了新李亚普诺夫泛函,在处理交叉项时应用的是 Jensen 不等
式,大大减少了计算量,提出了渐近稳定判据;在此基础上,学者们对不同系统做出了更多研究.例如,
文[16-17]分别提出了基于 MJS 连续系统和 MJS 离散系统的事件触发方式控制器设计的方案.文[18-19]分
别研究了基于 MJS 系统和模糊系统的事件触发方式滤波器问题.然而在基于事件触发机制的保性能控制方
面的研究相对较少,文[20]研究了在 MJS 连续系统中事件触发保性能控制,文[21]研究了基于非线性系统
的事件触发保性能控制.据本文所知,目前还没有离散化不确定 MJS 的事件触发保性能控制算法的成果.为
了更加注重实际应用性,本文是在文[14-15]的基础上考虑了 MJS,这类系统的理论结果更具有实际的应
用性.文[20]研究了基于事件触发机制连续 MJS 的保性能控制,它的理论结果更具有实际应用性,但是它
在处理交叉项时使用了自由加权矩阵法,增加了计算难度,同时保守性比较大,本文在处理交叉项时用了
Jensen 不等式,大大减少计算量.
本文的贡献主要有以下几点:1)为了减少有限网络资源的利用,提出动态模态切换的离散化事件触
发机制的方案,其中针对不同的马尔可夫模态,给出了不同的触发阈值;2)在时间间隔分析法的基础上,
将网络引起的时延和 MJS 建模成为一个时滞时变、触发系数动态切换和参数不确定的 MJS;3)利用
Jensen 不等式处理交叉项,减少计算负担和保守性,并且提出了事件触发条件和保性能控制器联合算法.
注 1 文中出现的 N 代表的是非负整数;上标“T”和“-1”表示矩阵的转置和矩阵的逆;R
n
表示 n 维欧
氏空间;R
m×n
表示 m×n 的实矩阵;字母 P>0 表示 P 是一个正定矩阵;I
n
代表的是一个 n×n 的单位矩
阵;diag{c
1
,c
2
,…,c
n
}代表的是一个 n×n 的对角矩阵;本文用*号表示矩阵的对称部分.
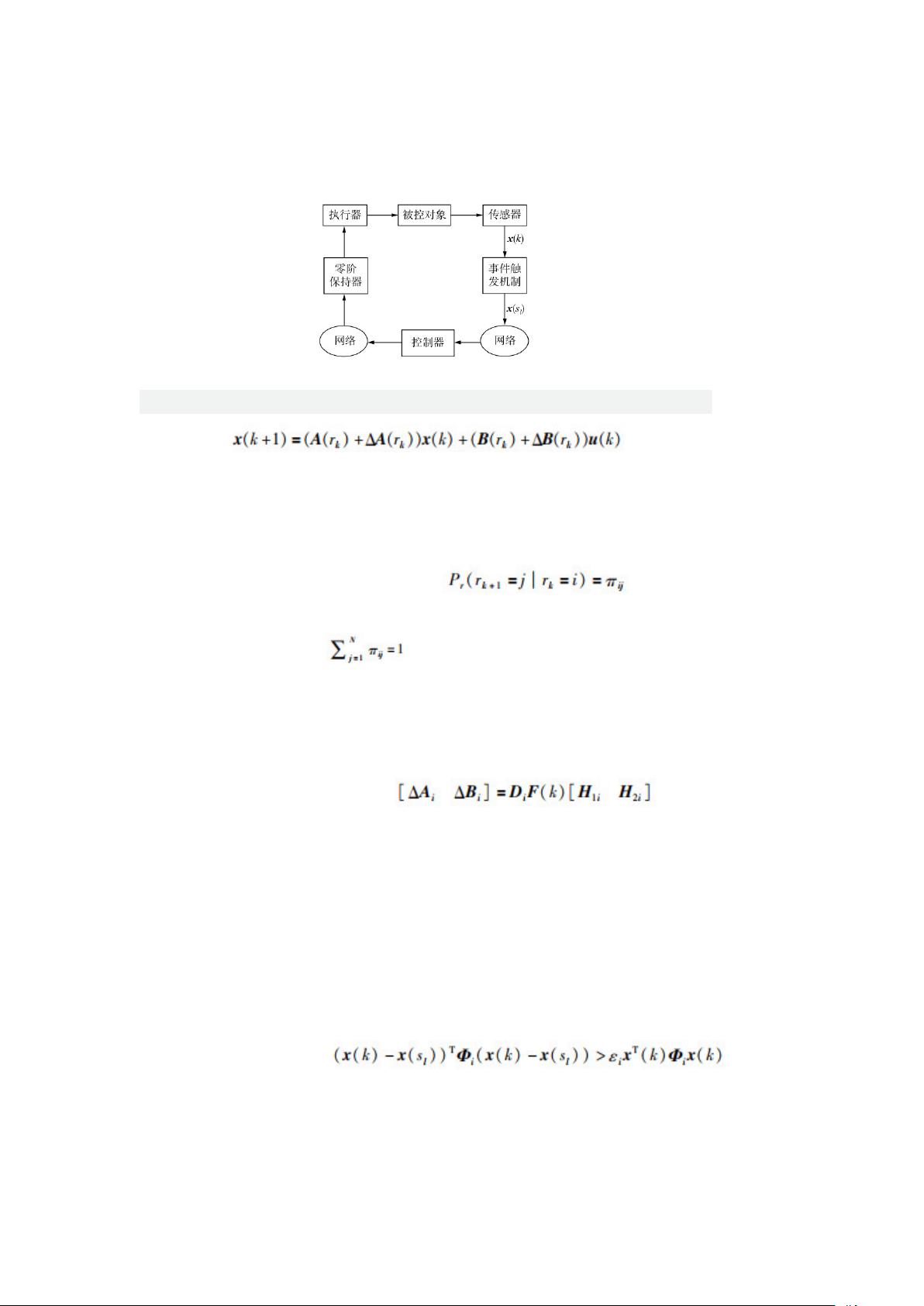
1 问题描述 1.1 系统描述

剩余14页未读,继续阅读

罗伯特之技术屋
- 粉丝: 4520
- 资源: 1万+

下载权益

C知道特权

VIP文章

课程特权
开通VIP


相关推荐
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0
最新资源